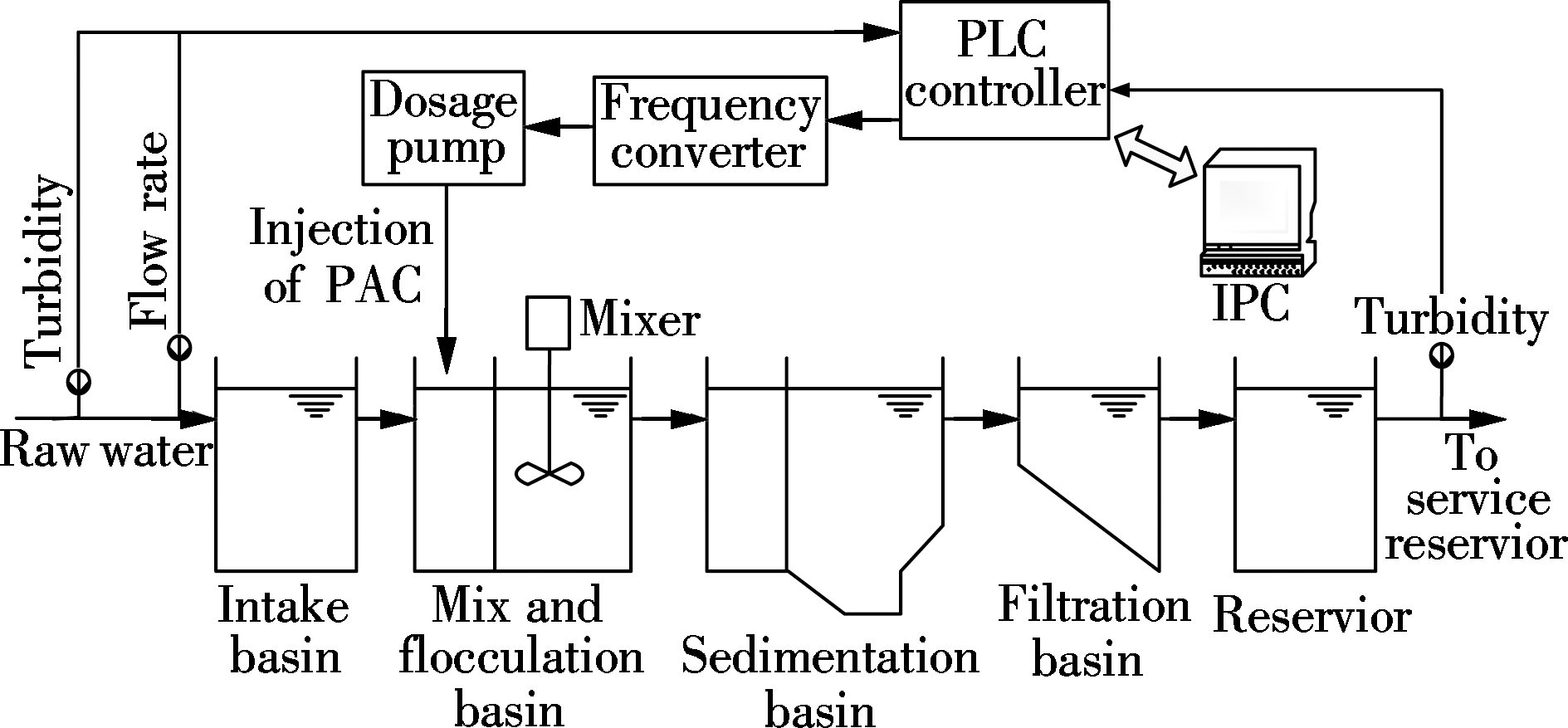
Fig.1 Schematic diagram of the coagulation process
Abstract:A composite control scheme consisting of model predictive control (MPC) and disturbance observer (DOB) is proposed to solve the control performance degradation problem of the turbidity of the treated water in the presence of significant changes in raw water quality, water flow rate and internal model mismatch disturbances. The MPC is employed as a feedback controller for the coagulation process with a large time delay. The DOB is adopted to estimate the severe disturbances in the turbidity control, such as large changes in raw water quality and water flow rate. The estimated values are applied for feed-forward compensation to reject disturbances. Finally, the disturbance rejection performances for step disturbances and time-varying disturbances in the nominal case and model mismatch case are tested. The simulation results illustrate that, compared with the MPC method, the proposed method can significantly improve the disturbance rejection performance in the turbidity control of the treated water, no matter if in the presence of external disturbances or internal model mismatch disturbances.
Key words:disturbance observer; composite control; coagulant dosage; disturbance rejection
The treatment of drinking water is of great importance as it can remove microorganisms and chemicals to protect public health[1-2]. In the water treatment, coagulation is an important process. It is mainly used to reduce the turbidity of raw water by adding the coagulant, such as the poly aluminum chloride (PAC). In the coagulation process, it is vital to determine the optimal coagulant dosage. Too high doses will lead to high cost and health problems related to high levels of residual aluminum. On the other hand, doses that are not sufficient will also cause unsatisfactory treated water quality[2-3]. In practice, an effective control strategy for coagulant dosage is to maintain the turbidity of treated water constant[4-5]. However, besides the coagulant dosage, the raw water quality (such as turbidity, pH, temperature) and the water flow rate also greatly affect the turbidity of the treated water[6]. At the same time, the raw water quality and the water flow rate always vary in the process. The flow rate changes largely when raw water pumps turn on or off. Meanwhile, when unusual condition, such as a heavy rain, occurs, the storm water will bring large changes to the raw water quality. These changes are expressed with difficulty using an accurate mathematical model[7-8]. In addition, the coagulation process consists of many long-time chemical and physical reactions[9]. In this case, undesirable characteristics, such as a long time delay, a large time constant, nonlinear and strong disturbances, appear when controlling the turbidity of the treated water. It is difficult to keep the turbidity of the treated water constant under the conditions of changeable and usually unpredictable raw water quality and water flow rates.
In order to control the turbidity of the treated water, the classical PID control algorithm[10] and some more advanced control algorithms were proposed and employed, including the fuzzy logic algorithm[11-12], the neural network[13-15], the model predictive control (MPC)[16-17] algorithm and so on. Among these algorithms, the MPC algorithm is very popular and widely adopted in industrial process control[18-19]. The MPC method is easy to understand and it has advantages when handling those systems with long time delays. Note that, the above-mentioned advanced control principles can only reject disturbances by the feedback regulation and they do not solve the disturbances directly.
In the coagulation process, various disturbances are present in the turbidity control system. External disturbances include the large variations in water flow rate and raw water quality. Internal disturbances, generally caused by model mismatches, may also cause poor dynamic performance. Besides the feedback regulation mentioned above, the feedforward compensation control is thought to be an effective method to counteract the disturbances when they can be measured. However, such a feedforward compensation method is infeasible in the coagulation process, since the precise disturbance channel models are difficult to obtain and some water quality parameters are also difficult to measure in real-time. To solve this problem, a disturbance observer (DOB) employing the disturbance estimation technique is introduced. The DOB is an effective technique to estimate disturbances and is widely applied in various practical systems, including the mechanical control system[20] and the flight control system[21-22].
This paper is based on a pilot-scale coagulation facility in Nanjing Chengbei Water Treatment Plant. A DOB-MPC scheme is proposed to improve the disturbance rejection performance of the coagulation process. The proposed scheme consists of a feedforward compensation based on DOB and a feedback regulation using MPC. It takes advantages of the MPC method in handling the dead-time processes and the DOB method in rejecting the unmeasured disturbances. Thus, it can effectively control the turbidity of the treated water and achieve a small peak overshoot and a short settling time under strong disturbances.
In the treatment of drinking water, the coagulation process is an important step to eliminate the turbidity of raw water (decrease the NTU value)[1]. Fig.1 presents a typical simplified coagulation system. The PLC gathers the real-time flow rate and turbidity of raw/treated water by the flow meter and turbidity meter, respectively. Then it generates a control signal for the frequency converter, which regulates the rotating speed of coagulant dosage pump to determine the amount of coagulant.
Fig.1 Schematic diagram of the coagulation process
In the coagulation process, coagulation/flocculation, sedimentation and filtration are commonly used treatment steps[1]. The raw water is first pumped into the intake basin. In the flocculation basin, the coagulants (such as PAC) are added to destabilize particles in raw water by neutralizing their surface charge. Then, the destabilized particles aggregate to form particles that are large enough to settle out of water in the sedimentation process. Filtration is the last step, in which physical barriers are used to screen out the aggregated particles[2]. In the sedimentation basin, the turbidity is reduced largely. The turbidity of the treated water is only a few NTU.
In the coagulation control system, the turbidity of the treated water is kept at a desired setpoint by regulating the coagulant dosage. Greater or lesser turbidity of the treated water than the setpoint will influence the treated water quality or degrade the production efficiency. However, strong external disturbances, such as changes in raw water quality (particularly the turbidity) and water flow rate, are always present. The water flow rate is determined by the demand of consumers and it can change dramatically when raw water pumps turn on or off. The raw water quality (especially the turbidity, pH, temperature) is dynamically variable with the season, weather and time[5]. Moreover, an unusual condition (such as a heavy rain) will bring high turbidity to raw water[1]. In addition, the coagulation process is a nonlinear process with long time delay and large time constant. Thus, keeping the turbidity of the treated water constant is an important and difficult task.
To sum up, in the coagulation process, the turbidity of the treated water y(NTU) is the most important controlled variable, which needs to be kept at a desired setpoint. The frequency of the frequency converter x(Hz), controlled by the PLC controller, is the manipulated variable. The frequency converter can regulate the rotating speed of the dosage pump to determine the coagulant dosage. Note that, the changes in raw water quality (mainly the turbidity dt) and water flow rate df will also cause the continuous fluctuation of the turbidity of the treated water. They are deemed to be external disturbances by the control system.
The coagulation is a typical and commonly used industrial process. In this process, the turbidity of the treated water can be regulated by controlling the coagulant dosage. Moreover, the coagulation process consists of long-time chemical and physical reactions. It is a nonlinear process with a long time delay and a large time constant. This process can be modeled as a first-order plus dead-time (FOPDT) form[4,23-24], which is a commonly used model to describe the dynamic of industrial process. The transfer function can be represented as

(1)
where K1 is the transfer factor from frequency to the turbidity of the treated water; T1 is the time constant; θ is the time delay.
Moreover, the bandwidth of turbidity meter can satisfy the system requirements, and the transfer function of the turbidity meter can be approximately evaluated by a proportional cycle K2.
In summary, the total transfer function of the turbidity control system in the coagulation process can be represented as

(2)
As shown in Eq.(2), the turbidity control system is modeled as a FOPDT process. The total system can be considered by the following model:
Y(s)=GP(s)X(s)+Dex(s)
(3)
where
GP(s)=g(s)e-θs
(4)

(5)
where X(s) is the manipulated variable; Y(s) is the controlled variable; Dex(s) is the effect of external disturbances on Y(s); Di(s) (i=1,2,…,M) is the i-th external disturbance; GP(s) is the model of the process channel; g(s) is the minimum-phase part of GP(s); Gdi(s) (i=1,2,…,M) is the model of the i-th disturbance channel; the nominal model Gn(s) can also be represented as a product of a minimum-phase part gn(s) and a dead-time part e-θns.
Gn(s)=gn(s)e-θns
(6)
2.1 Model predictive control
The process dynamic of the system (Eq.(6)) can be written as
(7)
Δx(t)=x(t)-x(t-1)
(8)
where x(t) is the manipulated variable; C(m) is the dynamic value obtained from the coefficients of unit step response; y(t) is the output under Δx(t-m) (m=1,2,…,∞). From Eq.(7), we can obtain that
(9)
where j=m-N. Then the N-th step ahead prediction of the output with the prediction correction term ![]() (t+N) can be shown as
(t+N) can be shown as
(10)
(11)
where ψ(t) is the prediction correction term. In Eq.(10), Δx(t+N-m) (m=1,2,…,N) represents that the future manipulated variable moves, which can be obtained by computing the following optimization problem:


(12)
(13)
where r(t+k) is the desired reference trajectory; e(t+k) is the prediction error; NP denotes the prediction horizon;NC denotes the control horizon; Mew is the error weighting value and Miw is the input weighting value. Only the first move is employed. For the next sampling instance, this step is repeated.
The parameters, such as NC, NP and sampling time Ts, are very important for the robustness and stability of the MPC algorithm. NP determines the dimension of the involved MPC matrix. NC is usually set to be much shorter than NP. The selection of sampling time Ts should consider both the real-time implementation and capturing the dynamics of the system[18].
2.2 Disturbance observer-enhanced MPC algorithm
In this part, a composite control scheme is proposed to enhance the performance of the MPC feedback controller by adding a disturbance observer. The block diagram of the proposed control scheme is presented in Fig.2.

Fig.2 Block diagram of the disturbance observer-enhanced MPC control
In Fig.2, r(s) denotes the reference trajectory of the controlled variable; P(s) represents the output of the MPC controller; and ![]() de(s) is the disturbance estimation. The output can be represented as
de(s) is the disturbance estimation. The output can be represented as
Y(s)=Gc(s)P(s)+Gd(s)Dex(s)
(14)
with

(15)

(16)
From Eqs.(14) to (16), it can be obtained that the performance of disturbance rejection mainly depends on the design of filter T(s). It can be found that ![]() Gd(jω)=0 when T(s) is selected as a low-pass filter with a steady-state gain of 1; i.e.,
Gd(jω)=0 when T(s) is selected as a low-pass filter with a steady-state gain of 1; i.e., ![]() T(jω)=1. It means that low-frequency disturbances can be attenuated asymptotically. In this paper, T(s) is selected as a first-order low-pass filter with a steady-state gain of 1, which can be represented as
T(jω)=1. It means that low-frequency disturbances can be attenuated asymptotically. In this paper, T(s) is selected as a first-order low-pass filter with a steady-state gain of 1, which can be represented as

(17)
The robustness of the proposed DOB is analyzed as follows. From Fig.2, the output Y(s) can be represented as
Y(s)= g(s)e-θsX(s)+Dex(s)=
gn(s)e-θnsX(s)+Did(s)+Dex(s)
(18)
where Did(s) is the internal disturbance caused by model mismatches and it can be denoted as
Did(s)=[g(s)e-θs-gn(s)e-θn(s)]X(s)
(19)
Next, defining the lumped disturbance Dld(s) as the sum of external disturbances Dex(s) and internal disturbances Did(s), that is
Dld(s)=Dex(s)+Did(s)
(20)
Then, the output can be obtained that
Y(s)=gn(s)e-θnsX(s)+Dld(s)
(21)
Moreover, from Fig.2, the following equations can be obtained:

(22)

(23)
Substituting Eq.(21) into Eq.(23), we can obtain

(24)
Defining ![]() ld(s) as the error between the real value and the estimation value of lumped disturbance, then
ld(s) as the error between the real value and the estimation value of lumped disturbance, then

(25)
Substituting Eq.(24) into Eq.(25) yields

(26)
Employing the final value theorem, the following equation can be obtained:


(27)
Therefore, if the steady-state gain of T(s) is 1, then ![]() ld(∞)=0 can be obtained. It means that the disturbances can be asymptotically rejected. Note that, the implementation of DOB is simple and the computational complexity will not be increased greatly. Thus, the modified disturbance observer is a practical approach to dealing with the process with time delay.
ld(∞)=0 can be obtained. It means that the disturbances can be asymptotically rejected. Note that, the implementation of DOB is simple and the computational complexity will not be increased greatly. Thus, the modified disturbance observer is a practical approach to dealing with the process with time delay.
2.3 Control implementation
In this work, the proposed control scheme focuses on disturbance rejection against external disturbances as well as model mismatches. The controlled variable is the turbidity of the treated water y, while the manipulated variable is the frequency of the frequency converter x. The variations of raw water turbidity dt and water flow rate df are the main external disturbances. The detailed control structure is shown in Fig.3.

Fig.3 Control structure of constant turbidity of the treated water
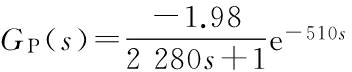
From Fig.3, it is shown that the coagulant dosage directly affects the turbidity of the treated water. For the control study, the step response of coagulant dosage in pilot-scale facilities has been tested to develop the transfer function model as[5,23]
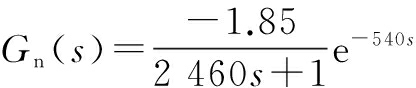
(28)
The nominal value of the turbidity of the treated water is 6.0 NTU. The external disturbances are imposed on the process through disturbance channels. It is known that the raw water turbidity and water flow rate have great influences on the turbidity of the treated water. For example, coagulant dosage with increased raw water turbidity or increased water flow rate leads to an increased turbidity of the treated water. These dynamics can be also modeled as a FOPDT form[24]. The transfer functions of disturbance channels Gdt(s) and Gdf(s) are obtained by step response tests in pilot-scale facilities and expressed as

(29)
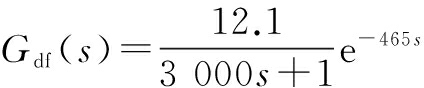
(30)
The time constants are expressed in seconds here. Gdt(s) and Gdf(s) denote the transfer functions of raw water turbidity variation disturbance and water flow rate variation disturbance, respectively. Here, the disturbances are expressed in a relative change form rather than a real physical unit form. For example, dt=10% means that the raw water turbidity has an increase of 10% compared with its nominal value. Moreover, based on the above discussions, the filter of DOB is employed as

(31)
The MPC controller parameters are designed as
NP=28,NC=1, Ts=1 min, Mew=1, Miw=1
(32)
In this part, some results are shown to demonstrate the benefits and practicality of the proposed method. The baseline MPC controller is employed for the comparison. The disturbance rejection performance is studied in the nominal case as well as the model mismatch case. Moreover, the Gaussian noise generator block (mean value=0, variance=2×10-4) is added to discuss the measurement noise.
3.1 Disturbance rejection in nominal case
First, the nominal case is considered. It means that Gn(s) is equal to GP(s). In the coagulation process, generally external disturbances including the raw water turbidity and water flow rate fluctuate continuously during the whole production process. Therefore, besides the step disturbance case, a sinusoidal disturbance case is also simulated.
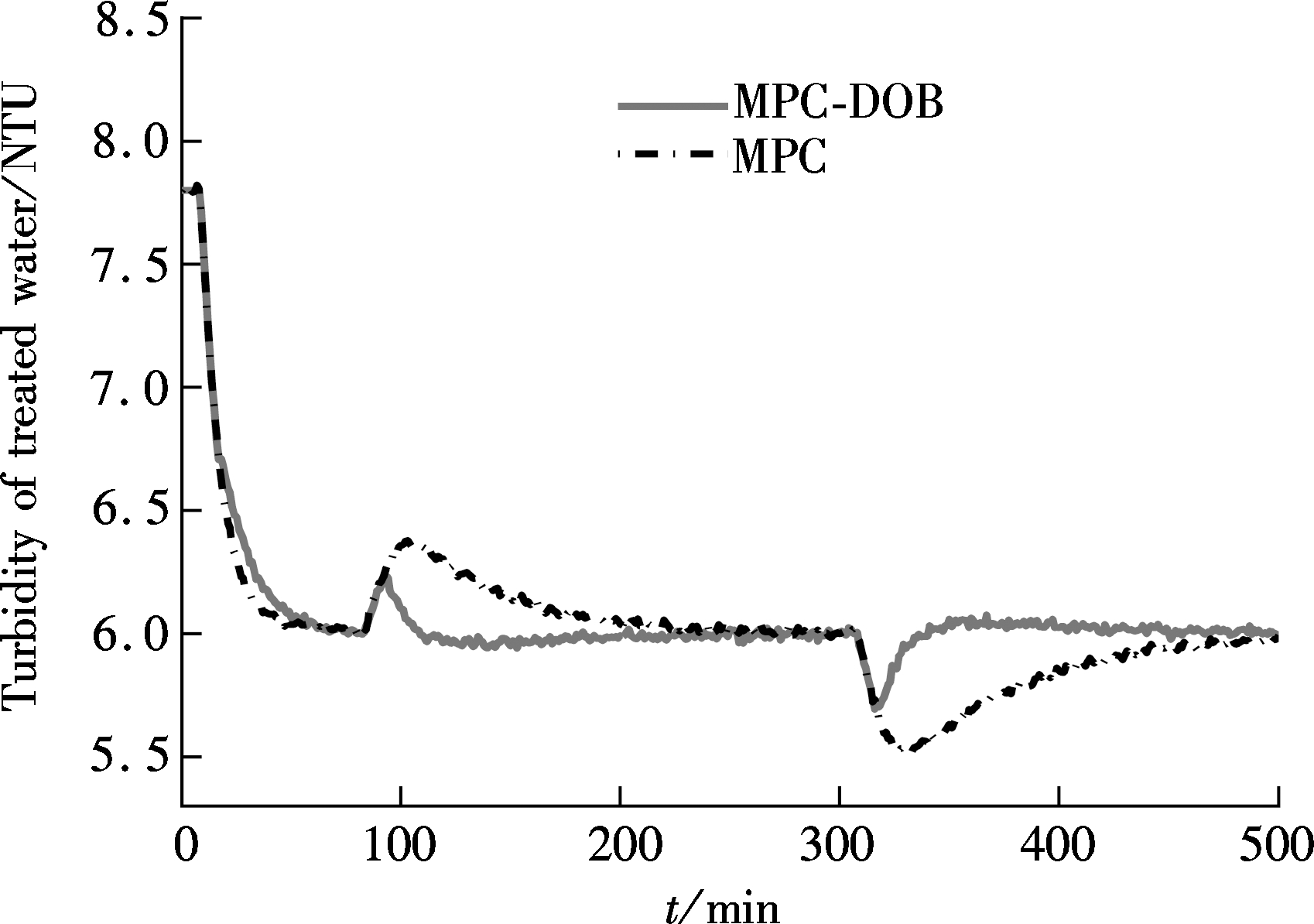
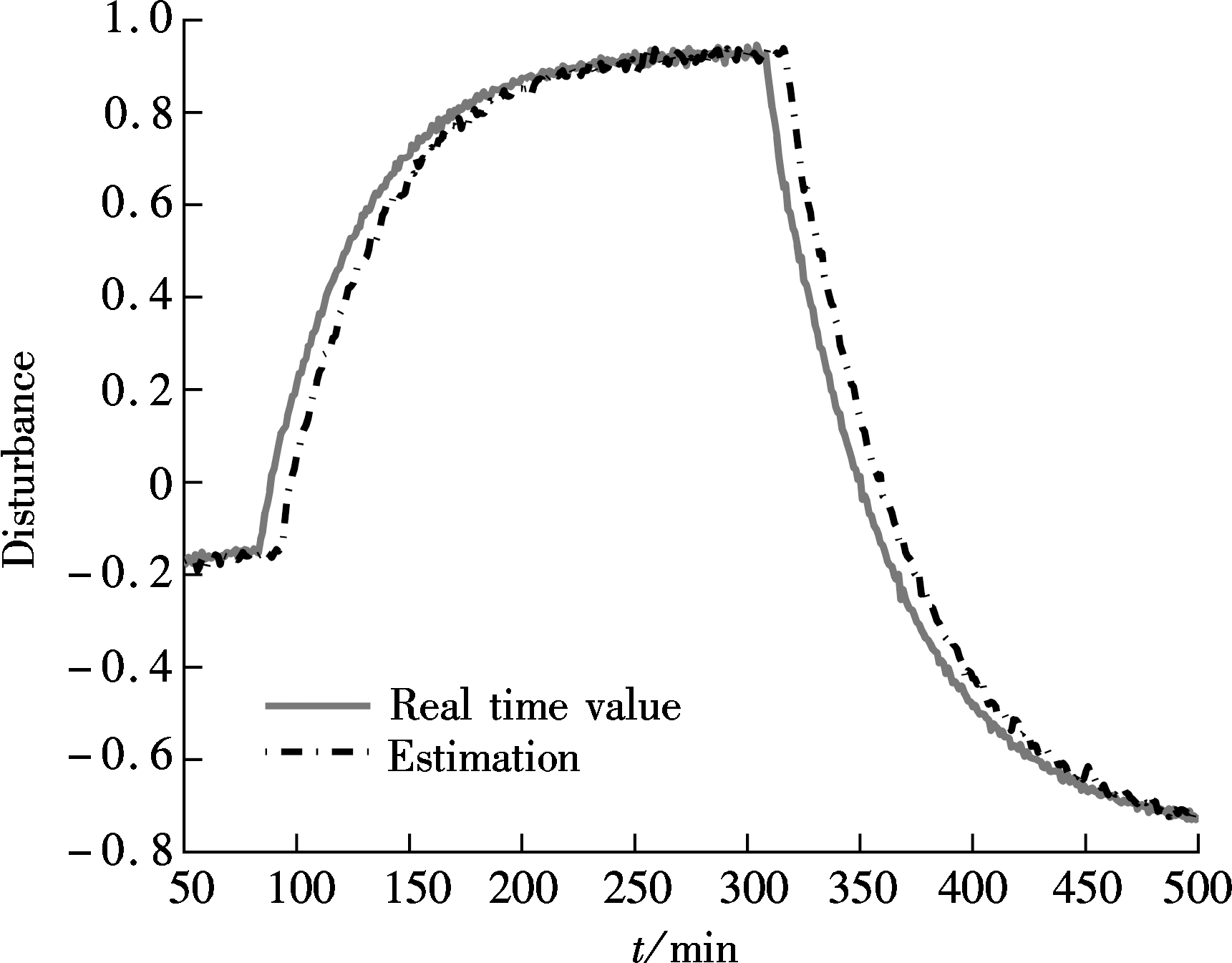
Case 1 Step external disturbances in the nominal case. The raw water turbidity has an increase of 15% at t=75 min, while the water flow rate has a decrease of 15% at t=300 min.
Fig.4(a) shows the response curves of the turbidity of the treated water under the control of both DOB-MPC and MPC in Case 1. The turbidity setpoint of the treated water is 6.0 NTU and the turbidity of the raw water is about 7.8 NTU. Fig.4(b) shows the effects of external disturbances and the estimations on the controlled variables. In Fig.4(a), the monotonously decreasing parts in the left of curves are employed to present the setpoint tracking properties of the two methods. From them, the setpoint tracking performances under the two methods are effective and acceptable, which means that the MPC controller parameters are suitable. Moreover, from Fig.4(a) the dynamic performance of the turbidity of the treated water under the proposed method is much better than that under the MPC method. Compared with the MPC method, the proposed method can obtain a faster convergence speed and smaller amplitudes of fluctuations. From Fig.4(b), the errors between the estimated and real external disturbances are very small, which means that the disturbance observer can effectively estimate the effects caused by disturbances.
In order to quantitatively analyze the disturbance rejection performance, two performance indices including peak overshoot and integral of absolute error (IAE) are employed, which are shown in Tab.1. From Tab.1, both the overshoot and the IAE value under the proposed method are much smaller than those under the MPC method.
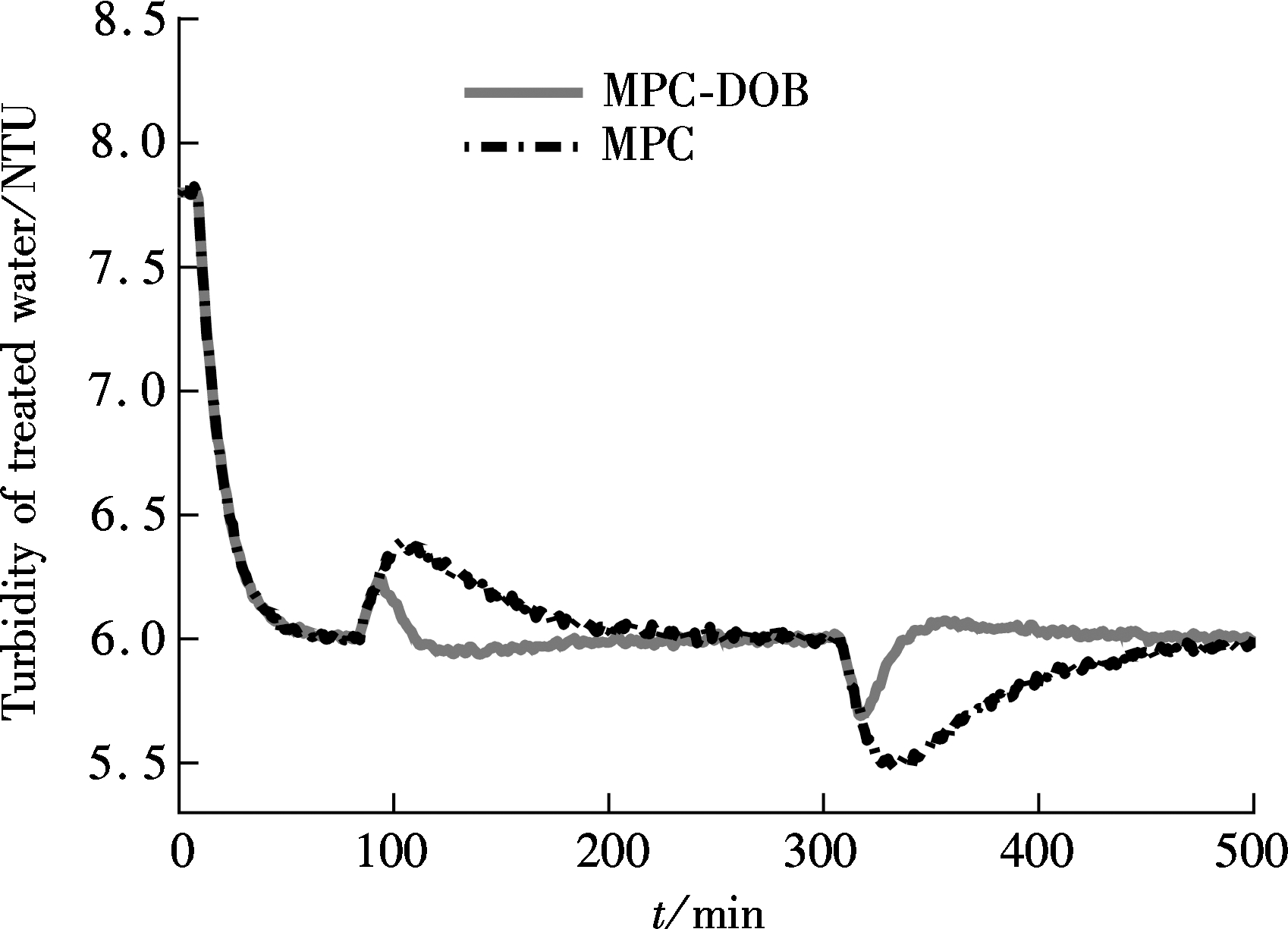
(a)
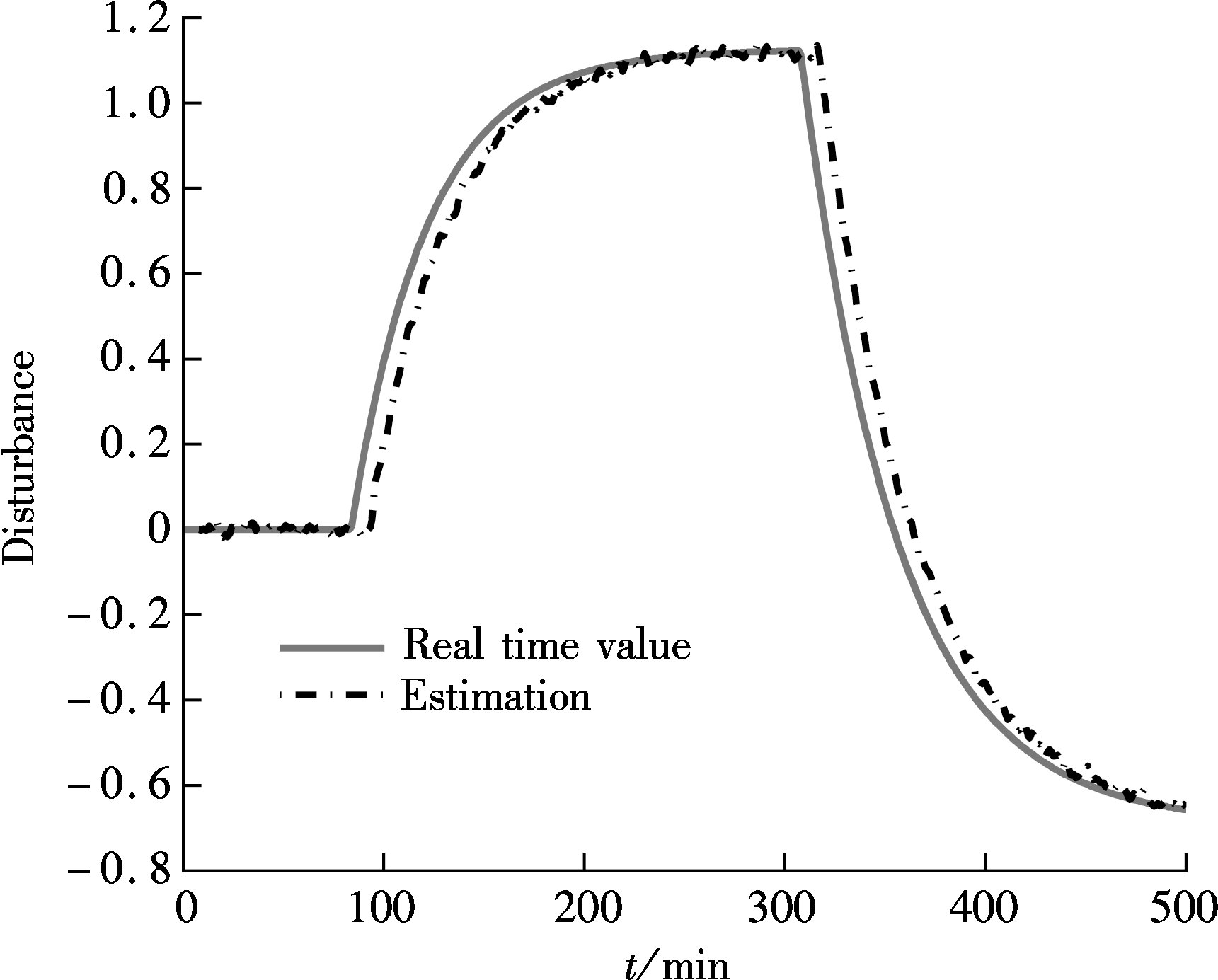
(b)Fig.4 Response curves of variables in the presence of step external disturbances under DOB-MPC and MPC schemes in the nominal case. (a) Controlled variable; (b) Disturbances and their estimations
Tab.1 Performance indices in the presence of step external disturbances in the nominal case
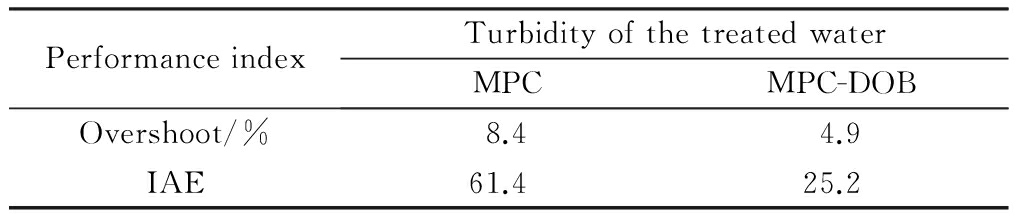
PerformanceindexTurbidityofthetreatedwaterMPCMPC-DOBOvershoot/%8.44.9IAE61.425.2
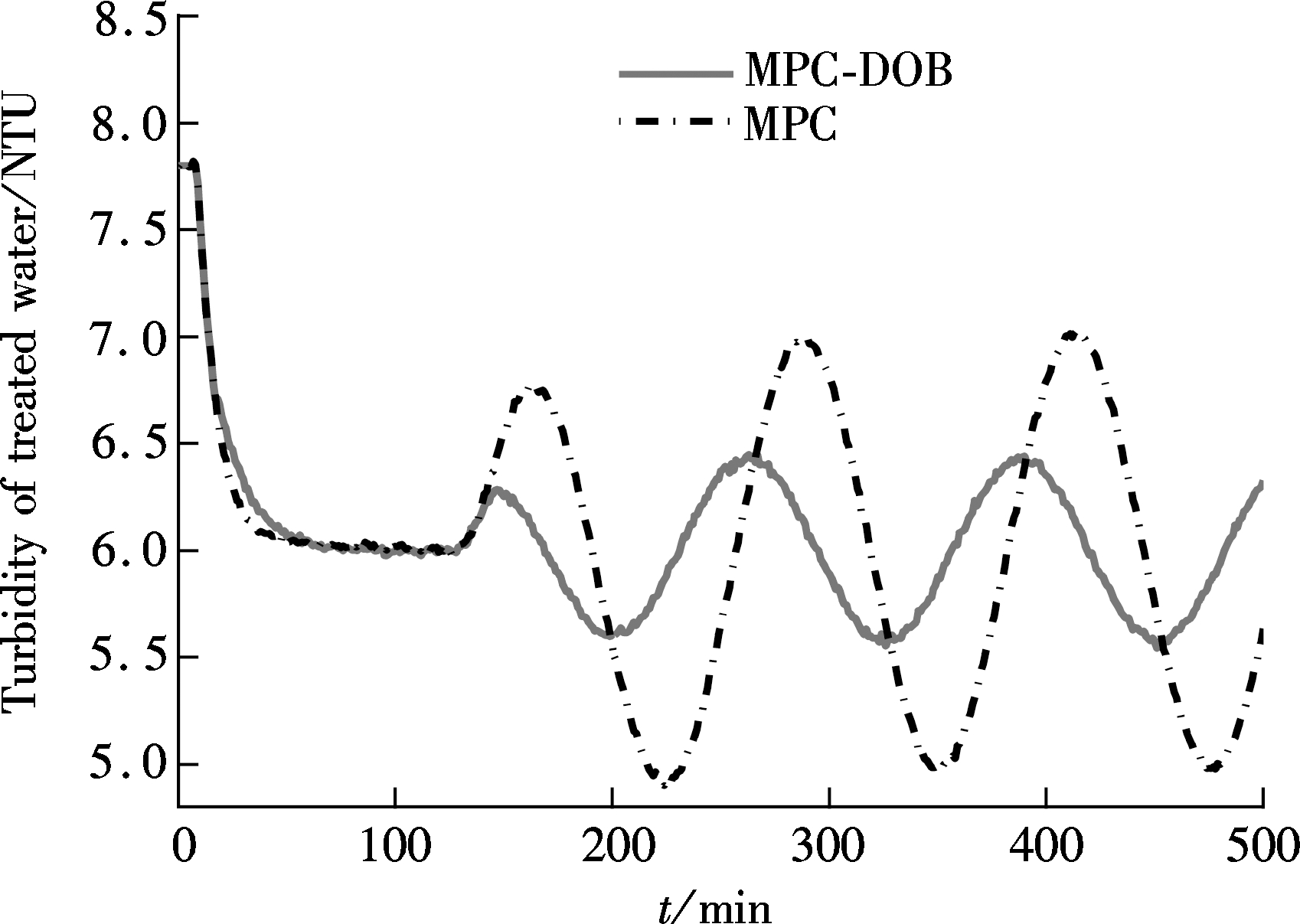
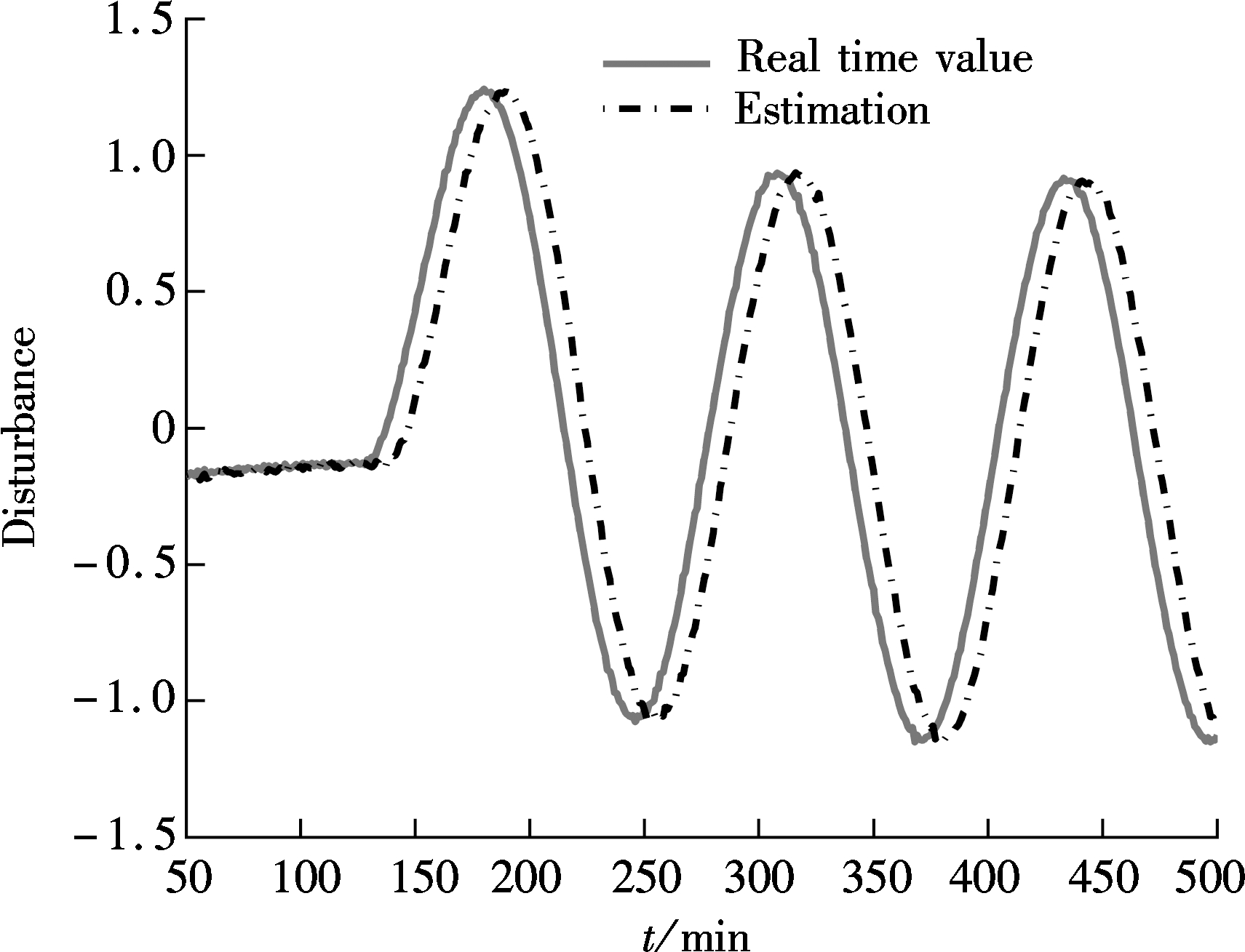
Case 2 Sinusoidal external disturbances in the nominal case. Variations of the raw water turbidity and water flow rate are sinusoidal; i.e.,dt=Asin(ωt),df=Bsin(ωt), here A=15%,B=15%,ω=0.05 rad/s.
Fig.5(a) shows the response curves of the turbidity of the treated water under the control of both DOB-MPC and MPC. Fig.5(b) gives the real disturbance and the estimation values by the disturbance observer. From Fig.5(a), the fluctuation amplitude of the turbidity of the treated water under the proposed method is much smaller than that under the MPC method, although the fluctuation frequencies under the two methods are almost the same. Moreover, from Fig.5(b), the real and the estimated disturbances almost overlap. Therefore, the proposed method is more effective to overcome such sinusoidal external disturbances than the conventional MPC method.

(a)
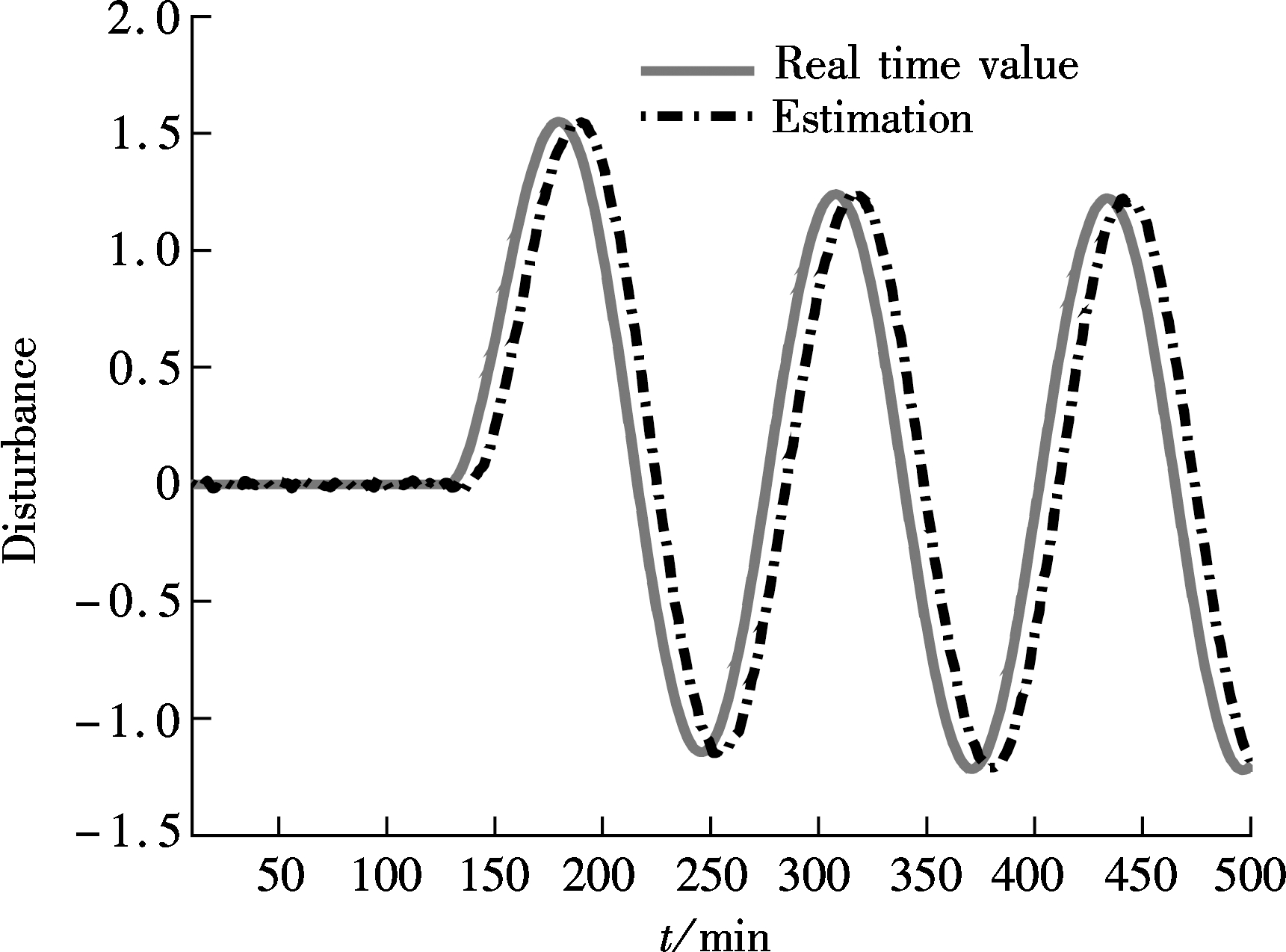
(b)Fig.5 Response curves of variables in the presence of sinusoidal external disturbances under DOB-MPC and MPC schemes in the nominal case. (a) Controlled variable; (b) Disturbances and their estimations
3.2 Disturbance rejection in model mismatch case
Suppose that the transfer function model of process channel is expressed as
(33)
Comparing Eq.(33) with Eq.(28), it is clear that severe model mismatch exists.
Case 3 Step external disturbances in the model mismatch case: The raw water turbidity has an increase of 15% at t=75 min, while the water flow rate has a decrease of 15% at t=300 min.
The response curves of the turbidity of the treated water under the control of the two methods in this mismatch case are shown in Fig.6(a). The effects of lumped disturbances and the estimations are presented in Fig.6(b). Similar to Case 1, it can be observed that the proposed method possesses a smaller peak overshoot and a faster convergence speed. This means that the proposed method has achieved a much better step disturbance rejection performance than that of the MPC method even in the case of severe model mismatches. Moreover, the errors between the estimated and the real lumped disturbances are very small.
(a)
(b)Fig.6 Response curves of variables in the presence of step external disturbances under DOB-MPC and MPC schemes in the mismatch case. (a) Controlled variable; (b) Disturbances and their estimations
Case 4 Sinusoidal external disturbances in the model mismatch case. Variations of raw water turbidity and water flow rate are sinusoidal; i.e., dt=Asin(ωt),df=Bsin(ωt), here A=15%,B=15%,ω=0.05 rad/s.
In Case 4, the response curves of the turbidity of the treated water under the control of the proposed method and the MPC method are shown in Fig.7(a). Fig.7(b) also gives the effects of estimated lumped disturbances in such a case. It can be seen from Fig.7(a) that the fluctuation amplitude of the turbidity under the proposed method (DOB-MPC) is much smaller than that under the MPC method. The fluctuation frequencies under the two methods are almost the same. Moreover, the disturbance estimation errors in this case are also small from Fig.7(b). The simulation results demonstrate that the proposed method has remarkable superiorities in rejecting such lumped disturbances consisting of external disturbances and internal disturbances caused by model mismatches.
In the coagulation process, various complex disturbances have undesirable influences on the turbidity of the treated water control system. Many existing methods in
(a)
(b)Fig.7 Response curves of variables in the presence of sinusoidal external disturbances under DOB-MPC and MPC schemes in the mismatch case. (a) Controlled variable; (b) Disturbances and their estimations
process control including MPC have limitations in handling strong disturbances. In order to improve the disturbance rejection performance, the disturbance observer is introduced for feedforward compensation in this work. A composite control scheme combining a feedforward compensation based on DOB with a feedback regulation based on MPC is developed. Both the external disturbances and the internal disturbances caused by model mismatches are taken into consideration. The disturbance rejection property is then analyzed by simulation. The results demonstrate that, compared with the MPC method, the proposed method exhibits excellent disturbance rejection performance, such as a smaller overshoot and a shorter settling time. In future, we will use the proposed method in the real coagulant dosing control system and test its effectiveness.
References:
[1]Wu G D, Lo S L. Predicting real-time coagulant dosage in water treatment by artificial neural networks and adaptive network-based fuzzy inference system [J]. Engineering Applications of Artificial Intelligence, 2008, 21(8): 1189-1195.
[2]Maier H R, Morgan N, Chow C W K. Use of artificial neural networks for predicting optimal alum doses and treated water quality parameters [J]. Environmental Modelling & Software, 2004, 19(5): 485-494. DOI:10.1016/s1364-8152(03)00163-4.
[3]Sanchez N P, Skeriotis A T, Miller C M. A PARAFAC-based long-term assessment of DOM in a multi-coagulant drinking water treatment scheme [J]. Environmental Science & Technology, 2014, 48(3): 1582-1591. DOI:10.1021/es4049384.
[4]Li Z F, Zou Z Y, Luo Y H, et al. Intelligent control of turbidity before filtration in waterworks [J]. Water Purification Technology, 2009, 28(4): 64-67.
[5]Akbarizadeh M, Daghbandan A, Yaghoobi M. Modeling and optimization of poly electrolyte dosage in water treatment process by GMDH type-NN and MOGA [J]. International Journal of Chemoinformatics and Chemical Engineering, 2013, 3(2): 94-106.
[6]Griffiths K A, Andrews R C. The application of artificial neural networks for the optimization of coagulant dosage [J]. Water Science and Technology: Water Supply, 2011, 11(5): 605-611.
[7]Lamrini B, Benhammou A, Le Lann M V, et al. A neural software sensor for online prediction of coagulant dosage in a drinking water treatment plant [J]. Transactions of the Institute of Measurement and Control, 2005, 27(3): 195-213. DOI:10.1191/0142331205tm141oa.
[8]Heddam S, Bermad A, Dechemi N. ANFIS-based modelling for coagulant dosage in drinking water treatment plant: A case study [J]. Environmental Monitoring and Assessment, 2012, 184(4): 1953-1971. DOI:10.1007/s10661-011-2091-x.
[9]Apostol G, Kouachi R, Constantinescu I. Optimization of coagulation-flocculation process with aluminum sulfate based on response surface methodology [J]. UPB Buletin Stiintific, Series B: Chemistry and Materials Science, 2011, 73(2): 77-84.
[10]Wei A I, Zhu X F. Research on VRFT-based IMC-PID method and simulation of turbidity control in water supply plant [J]. Control and Instruments in Chemical Industry, 2011, 2: 141-144. (in Chinese)
[11]Heddam S, Bermad A, Dechemi N. ANFIS-based modelling for coagulant dosage in drinking water treatment plant: A case study [J]. Environmental Monitoring and Assessment, 2012, 184(4): 1953-1971. DOI:10.1007/s10661-011-2091-x.
[12]van der Walt J J, Smith J N, Nel M C. Fuzzy logic production control: The vaalkop water treatment plant case study [C]//Biennial Conference of the Water Institute of Southern Africa. Durban, South Africa, 2002: 1-12.
[13]Robenson A, Shukor S R A, Aziz N. Development of process inverse neural network model to determine the required alum dosage at segama water treatment plant Sabah, Malaysia [J]. Computer Aided Chemical Engineering, 2009, 27: 525-530. DOI:10.1016/s1570-7946(09)70308-6.
[14]Griffiths K A, Andrews R C. The application of artificial neural networks for the optimization of coagulant dosage [J]. Water Science and Technology Water Supply, 2011, 11(5): 605-611.
[15]Heddam S, Dechemi N. A new approach based on the dynamic evolving neural-fuzzy inference system (DENFIS) for modelling coagulant dosage (Dos): Case study of water treatment plant of Algeria [J]. Desalination and Water Treatment, 2015, 53(4): 1045-1053. DOI:10.1080/19443994.2013.878669.
[16]Bello O, Hamam Y, Djouani K. Fuzzy dynamic modelling and predictive control of a coagulation chemical dosing unit for water treatment plants [J]. Journal of Electrical Systems and Information Technology, 2014, 1(2): 129-143. DOI:10.1016/j.jesit.2014.08.001.
[17]Pekel L C, Zeybek Z, Hapoglu H, et al. Textile wastewater treatment with coagulation and GPC control [J]. Chemical Engineering, 2010, 21: 817-822.
[18]Maciejowski J M. Predictive control: With constraints [M]. London: Prentice Hall, 2001.
[19]Prakash J, Patwardhan S C, Shah S L. State estimation and nonlinear predictive control of autonomous hybrid system using derivative free state estimators [J]. Journal of Process Control, 2010, 20(7): 787-799. DOI:10.1016/j.jprocont.2010.04.001.
[20]Kobayashi H, Katsura S, Ohnishi K. An analysis of parameter variations of disturbance observer for motion control [J]. IEEE Transactions on Industrial Electronics, 2007, 54(6): 3413-3421.
[21]Li S H, Yang J. Autopilot design for bank-to-turn missiles using robust state feedback control and disturbance observers [J]. IEEE Transactions on Aerospace and Electronic Systems, 2013, 49(1): 558-579. DOI:10.1109/taes.2013.6404120.
[22]Li Shihua, Yang Jun, Chen Wenhua, et al. Disturbance observer-based control: Methods and applications [M]. Boca Raton, FL,USA: CRC Press, 2014.
[23]Mo X M. Dynamic matrix control based on multi-model synthesis and its application [C]//The 26th Chinese Control Conference. Zhangjiajie, China, 2007: 167-170. DOI:10.1109/chicc.2006.4346778. (in Chinese)
[24]Zhu X F, Liu G X, Chen J, et al. Forward and feedback intelligent control of out water coming from water factory [J]. Control Engineering of China, 2010, 17(3): 290-296. (in Chinese)
Citation:Niu Dan, Chen Xisong, Yang Jun, et al. Composite control for coagulation process with time delay and disturbances[J].Journal of Southeast University (English Edition),2016,32(3):285-292.DOI:10.3969/j.issn.1003-7985.2016.03.005.
DOI:10.3969/j.issn.1003-7985.2016.03.005
摘要:为了解决源水水质变化、流量变化等外部干扰以及模型不匹配等内部干扰造成滤后水浊度控制性能变差的问题,提出一种基于模型预测控制和扰动观测器的复合控制方法.采用模型预测控制方法对带有大时延的混凝投加过程进行反馈控制,再结合扰动观测器对浊度控制中的源水水质变化、流量变化等扰动进行估计,将估计出的扰动用于前馈补偿来抑制扰动.最后用所提控制方法在标称情况和模型不匹配情况下对阶跃扰动和时变扰动的抗扰动性能进行测试.仿真结果表明,相比较单一的模型预测控制方法,所提复合控制方法能够显著提高滤后水浊度控制中对于外部扰动以及内部模型不匹配扰动的抑制能力.
关键词:扰动观测器;复合控制;混凝投加;扰动抑制
中图分类号:TP273
Received:2016-02-13.
Foundation item:s:The National Natural Science Foundation of China (No.61504027), the Natural Science Foundation of Jiangsu Province (No.BK20140647), the Priority Academic Program Development of Jiangsu Higher Education Institutions.
Biographies:Niu Dan(1986—),male,doctor; Chen Xisong(corresponding author), male, doctor, professor, chenxisong@263.net.