Abstract:In order to overcome the wide-range load tracking and unknown disturbance issues of an ultra-supercritical boiler-turbine unit, a fuzzy disturbance rejection predictive control approach is proposed using the techniques of fuzzy scheduling, model predictive control and extended state observer. Local state-space models are established on the basis of nonlinearity analysis and subspace identification. To enhance the disturbance rejection capability of the controller, an extended state observer is employed to estimate unknown disturbances and model mismatches. The disturbance estimation enhanced local predictive controllers are subsequently devised based on the local models, the performance of which is further strengthened by incorporating the fuzzy scheduling technique. The simulation results verify the merits of the proposed strategy in achieving satisfactory wide-range load tracking and disturbance rejection performance.
Key words:ultra-supercritical power plant; model predictive control; fuzzy control; extended state observer
The past decade witnessed the booming development of the ultra-supercritical power plant (USPP), in light of the high efficiency and low emissions, which has inevitably become the dominant role in the coal-fired power industry. The load coordinate control system is critical to the operation of USPP, which is responsible for the power grid balance while maintaining the safety and efficiency of the boiler-turbine system[1]. However, as the USPP increases in size and operates at a high temperature and pressure level, the control of the boiler-turbine unit presents a great challenge due to its complex behavior, such as large inertia, couplings among multi-variables and strict input constraints.
To this end, employing advanced control approaches for the boiler-turbine unit to improve the performance of conventional proportional-integral-derivative (PID) controller has received much attention. Among them, model predictive control (MPC) is one of the most prevailing techniques because it can naturally handle the multi-variable and constraint issues in an optimal way[2].
Recently, as the utilization of renewable energy consistently grows in the power system, fossil fuel fired power plants have to change load rapidly within a wide range to meet the demand of grid. As a result, the nonlinear issue of the boiler-turbine unit becomes significant and the conventional linear controllers may no longer meet the design specifications, even when they are well tuned at the given operating point. To overcome this difficulty, fuzzy MPC (FMPC) has been applied in order to attain satisfactory operation performance during wide-range load following. In FMPC, a combination of several linear models are used to approximate the nonlinear behavior of the plant[3-6]. In Ref.[3], two types of fuzzy control strategies were compared, i.e. the local model-based strategy and the local controller-based strategy, and the comparison results indicate that the latter can achieve a better performance at the expense of more computational effort. In Refs.[4-6], fuzzy clustering and the subspace identification (SID) method were utilized to develop the fuzzy model. Then, on the basis of the model, fuzzy predictive controllers were devised, which had a satisfactory wide-range load following performance.
In spite of the effectiveness of FMPC in wide-range load tracking, they alone cannot deal with the unknown disturbances or plant behavior variations effectively, which occur extensively during the daily operation of the USPP, e.g. the variation of fuel quality, wearing out of the valves, various measurement noises, etc. These disturbances are all unknown or difficult to measure accurately, thus their effect will degrade the control performance severely, or even cause the system to become unstable. For this reason, extended state observer (ESO)-based control has been investigated and employed in power plants recently[7-9]. As one type of active disturbance rejection control (ADRC) techniques, the basic working principle of ESO is to estimate and compensate the effect of unknown disturbances at the input side, so that the performance of the original controller can be enhanced[10]. In Ref.[7], an ESO-based PID controller was developed based on the flexible structure design approach, and the simulation studies on a 300 MW boiler-turbine unit showed that the proposed controller can effectively alleviate the influence of unknown step-type disturbances. A combination of static decoupling PID and ESO was applied to the boiler-turbine unit in Refs.[8-9], which can attain superior performance over the conventional PID controller. However, all of the aforementioned methods utilize the ESO technique on the basis of basic state feedback control. Therefore, when wide-range load tracking and input constraints are taken into consideration, they cannot achieve a satisfactory performance.
To overcome the above limitations, a novel fuzzy disturbance rejection predictive control (FDRPC) using the combination of ESO and fuzzy MPC is proposed to enhance the overall performance of the boiler-turbine unit. Differently from the conventional ESO structure, which uses the disturbance estimation as a feedforward signal, the proposed FDRPC uses the disturbance estimation to make the prediction more accurate. Therefore, the disturbance can be removed without breaking the optimality of the predictive control system. The synthesized FDRPC can achieve satisfactory load tracking and disturbance rejection properties simultaneously.
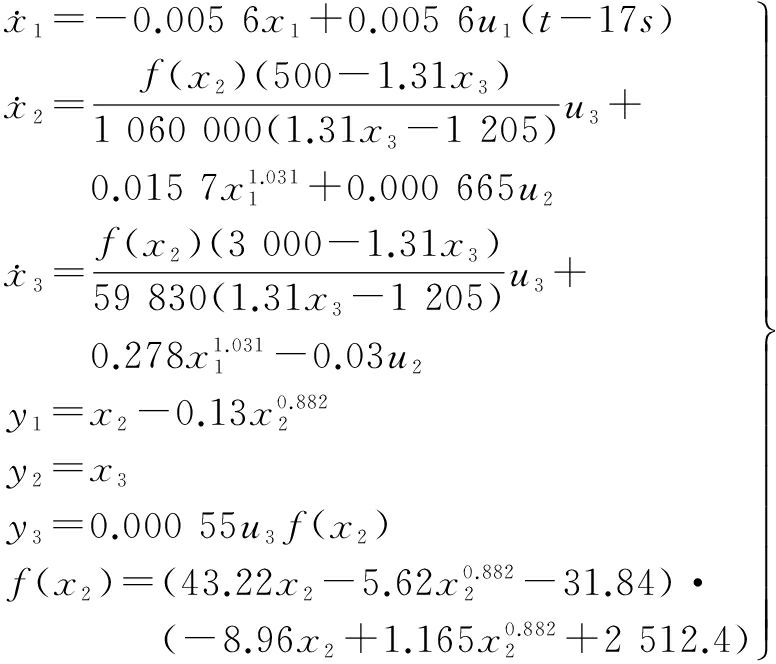
The boiler-turbine unit under consideration represents the dynamics of a 1 000 MW coal-fired power plant located at Taizhou, China. It was developed based on first principle and data analysis, and formulated into the following mathematical model[11]:
(1)
where x1 denotes the coal flow rate that enters the boiler, kg/s; x2 denotes the separator steam pressure, MPa; and x3 denotes the separator steam enthalpy, kJ/kg. Manipulation variables u1, u2 and u3 are the fuel flow rate command, the feedwater flow rate, and the turbine governor valve position, respectively. They are constrained by the physical limitations of actuators: 40 kg/s≤u1≤100 kg/s, 350 kg/s≤u2≤800 kg/s, 0≤u3≤100%, ![]() kg/s,
kg/s, ![]()
![]() ≤1%. The controlled variables of the system are the throttle steam pressure y1, the separator steam enthalpy y2 and the active power generated by the turbine y3.
≤1%. The controlled variables of the system are the throttle steam pressure y1, the separator steam enthalpy y2 and the active power generated by the turbine y3.
2.1 Subspace identification-based local model description
In this section, the fuzzy modeling strategy is utilized to capture the nonlinear behavior of the boiler-turbine unit using the combination of several linear models. To develop a satisfactory fuzzy model, the level of nonlinearity over the full operating range should be investigated first, so that the minimum number of linear models can be determined. The nonlinearity within 550 to 1 000 MW operating range is analyzed by the Vinnicombe gap (V-gap) metric[12], which is a measure of the distance between linear models. The V-gap values between some typical operating points and nominal operating point 6# of the boiler-turbine unit are shown in Tab.1, and a large value represents a large difference between the two linear models. It can be seen that the nonlinearity of the plant is uniformly distributed within the operating range of 550 to 1 000 MW. Although using more local models will improve the accuracy of the integrated fuzzy model; for the sake of simplicity, three local models are developed around operating points 1#, 3#, 5#, which represent the dynamics of low/middle/high load regions, respectively.
Tab.1 V-gap values between typical operating points and nominal operating point
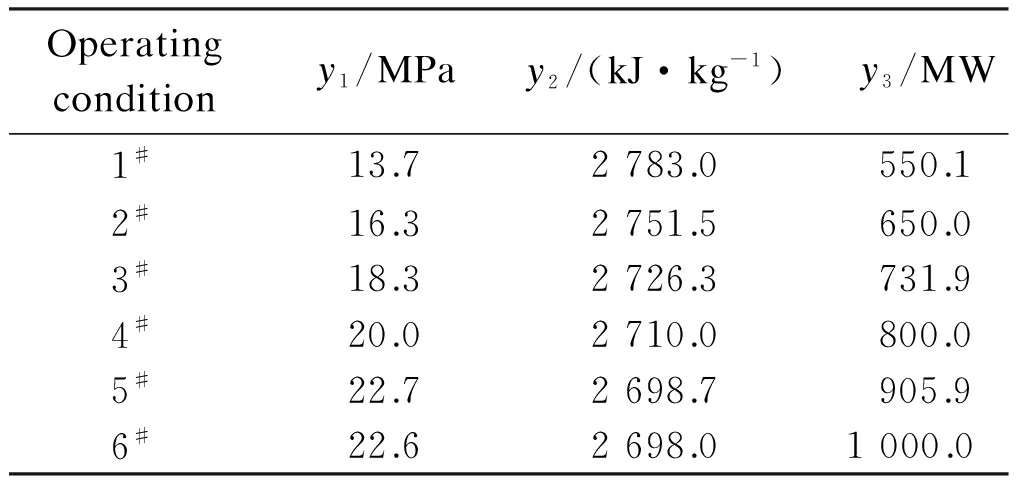
Operatingconditiony1/MPay2/(kJ·kg-1)y3/MWV-gapvalue1#13.72783.0550.10.162#16.32751.5650.00.123#18.32726.3731.90.094#20.02710.0800.00.065#22.72698.7905.90.036#22.62698.01000.0 0
The approach of SID[13] is then adopted to identify the following state-space type model for local region-i directly from the input-output data:

(2)
where Ai, Bi, Ci, Di are the identified system matrices for the i-th local model. xi∈Rnx, yi∈Rny, ui∈Rnu are the state, output and input vector of the i-th local model, respectively. Since the SID utilizes tools such as singular value decomposition (SVD) and QR-factorization, it has some computational advantages, which can avoid local minima and convergence problems.
2.2 Design of fuzzy disturbance rejection predictive control
To alleviate the influence of unknown disturbances during the operation of the boiler-turbine unit, the technique of ESO is employed in the fuzzy model predictive control system, resulting in a novel FDRPC structure. Unlike the conventional ESO based control, which uses the disturbance estimation as a feedforward signal acting on the control system; in the FDRPC design, the estimated disturbance is used as a compensation term to make the prediction model more accurate. Thus MPC’s ability during disturbance rejection can be enhanced without breaking the optimality of the predictive control system.
Consider the following local state-space model with a disturbance term:

(3)
where di is the lumped disturbance including both the external disturbance and unmodeled dynamics. It can be augmented to a new virtually extended state-space model:

(4)
where


Suppose that the system (4) is observable, and a linear extended state observer can be devised to estimate the extended state value:

(5)
where ![]() ]T is the estimate of the extended state variable. Matrix Li is the observer gain which can be determined by solving the following linear matrix inequalities[14]:
]T is the estimate of the extended state variable. Matrix Li is the observer gain which can be determined by solving the following linear matrix inequalities[14]:

(6)
Then the observer gain can be determined by ![]() Gi.
Gi.
By employing the designed ESO, the lumped disturbance di can be estimated, which can reflect the effect of unknown disturbances and plant behavior variations. Therefore, the augmented model (4) can be adopted as the predictive model instead of the local model (2). Moreover, since the estimated disturbance di is utilized within the MPC formulation, the dynamic optimality of the predictive control system will not be broken.
For the purpose of output tracking, the following dynamic objective function is considered in the model predictive control formulation:

(7)
where ![]() T is the desired output trajectory;
T is the desired output trajectory; ![]() T is the predicted output;
T is the predicted output; ![]() (k+Nu)]T is the increment of control action; Np and Nu are the predictive horizon and control horizon;
(k+Nu)]T is the increment of control action; Np and Nu are the predictive horizon and control horizon; ![]() and
and ![]() are the weighting matrices for outputs and inputs, respectively.
are the weighting matrices for outputs and inputs, respectively.
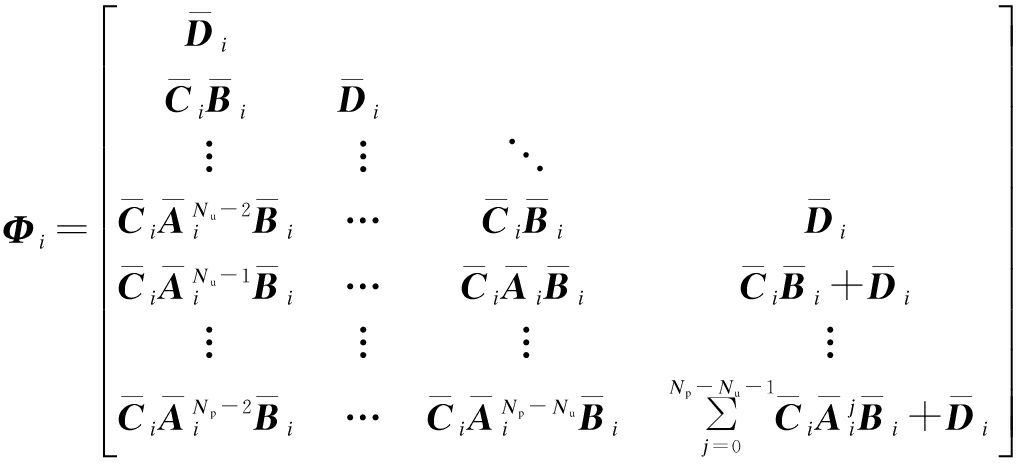
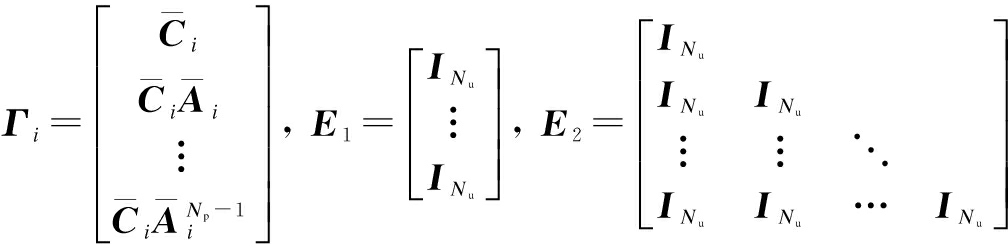
By stacking up the augmented model (4), the predicted output ![]() i can be expressed as a function of the increment of control action ΔUi:
i can be expressed as a function of the increment of control action ΔUi:

Φi(E1ui(k)+E2ΔUi)
(8)
where


Substituting (8) into the objective function (7) and at each sampling time, minimizing (7) subjected to the input constraints, ΔUi can be calculated and the local control action value ui(k+1)=ui(k)+Δui(k+1) can be obtained.
Then, by adopting the output power y3 as the scheduling parameter, the three local controllers are combined through the fuzzy membership functions, resulting in the final FDRPC.

(9)
where the membership function wi satisfies ![]() wi=1. Since the nonlinearity of the boiler-turbine unit is evenly distributed between 550 and 1 000 MW, a triangular type fuzzy membership function as shown in Fig.1 is devised to combine the three local controllers.
wi=1. Since the nonlinearity of the boiler-turbine unit is evenly distributed between 550 and 1 000 MW, a triangular type fuzzy membership function as shown in Fig.1 is devised to combine the three local controllers.
The ESO is designed for each local MPC, estimating and compensating for the effect of unknown disturbances. Its combination with fuzzy MPC can handle the wide-range load tracking and unknown disturbance issues of the boiler-turbine unit simultaneously. The schematic diagram of the FDRPC is shown in Fig.2.
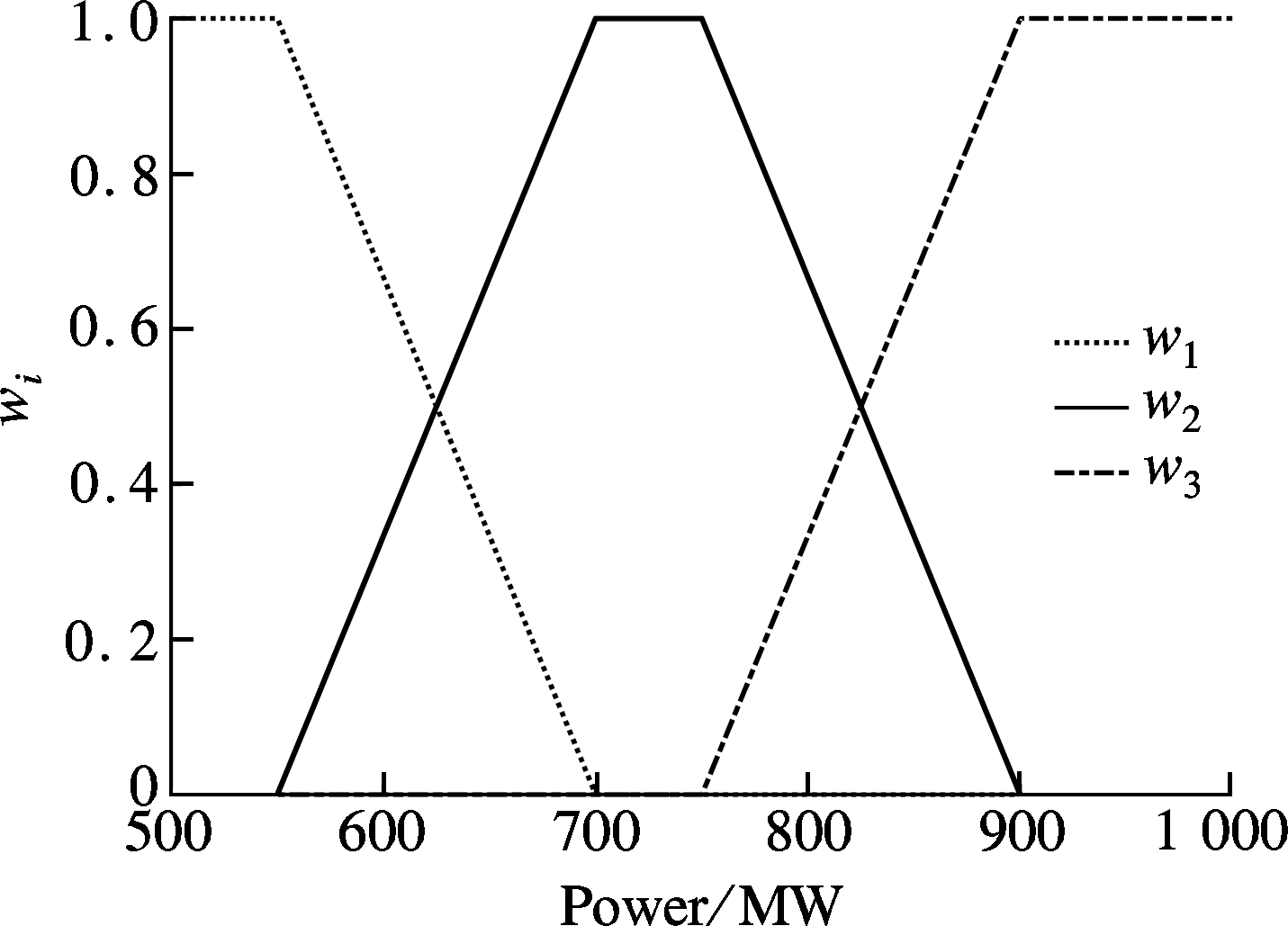
Fig.1 Membership function for fuzzy rules
In this section, the proposed FDRPC is employed to control the boiler-turbine unit of the 1 000 MW USPP. The parameters of the proposed controller are set as follows: the sample time Ts=5 s, the predictive horizon Np=50 s; the control horizon Nu=25 s; and the weighting matrices ![]() =Iny⊗Q,
=Iny⊗Q, ![]() =Inu⊗R with diagonal elements Q=diag(390,18,1.2), R=diag(15,4,20); and ⊗ represents the Kronecker product.
=Inu⊗R with diagonal elements Q=diag(390,18,1.2), R=diag(15,4,20); and ⊗ represents the Kronecker product.
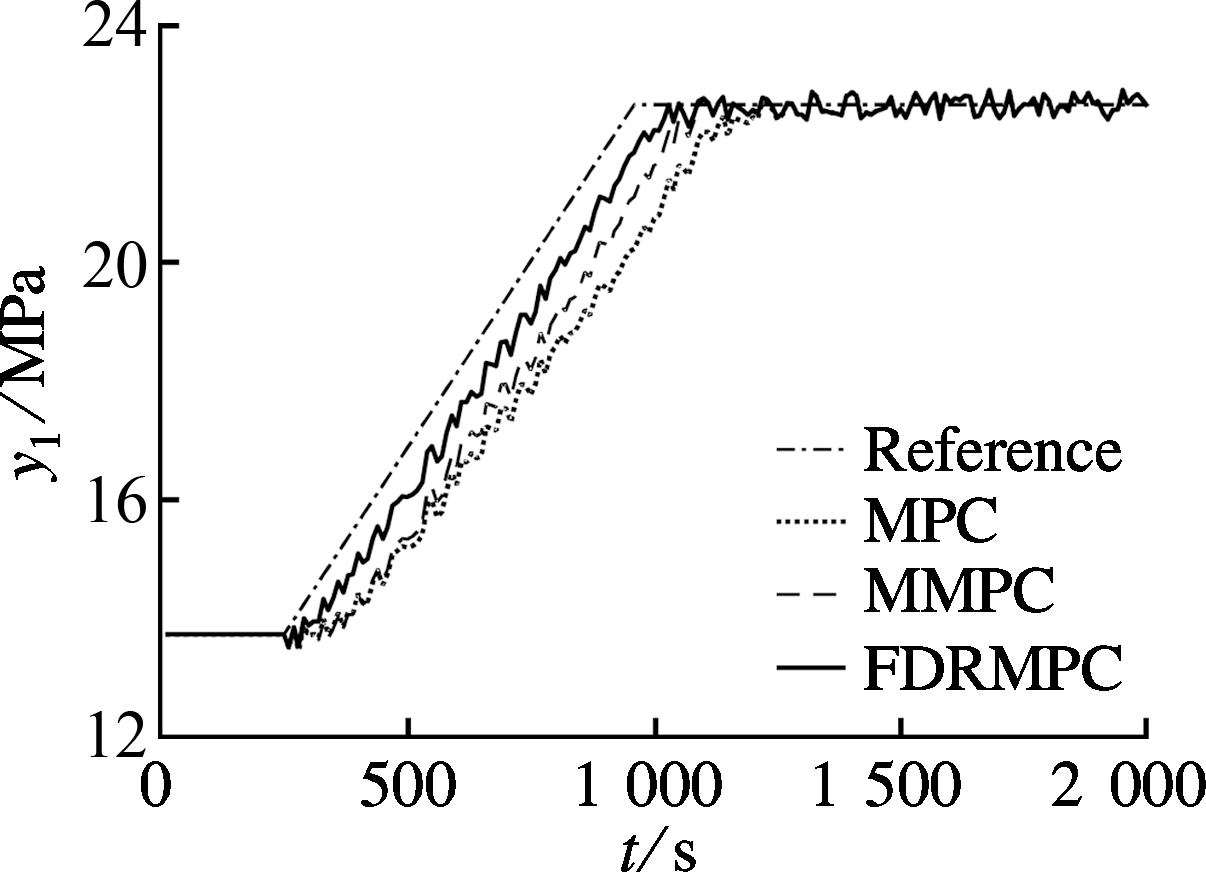
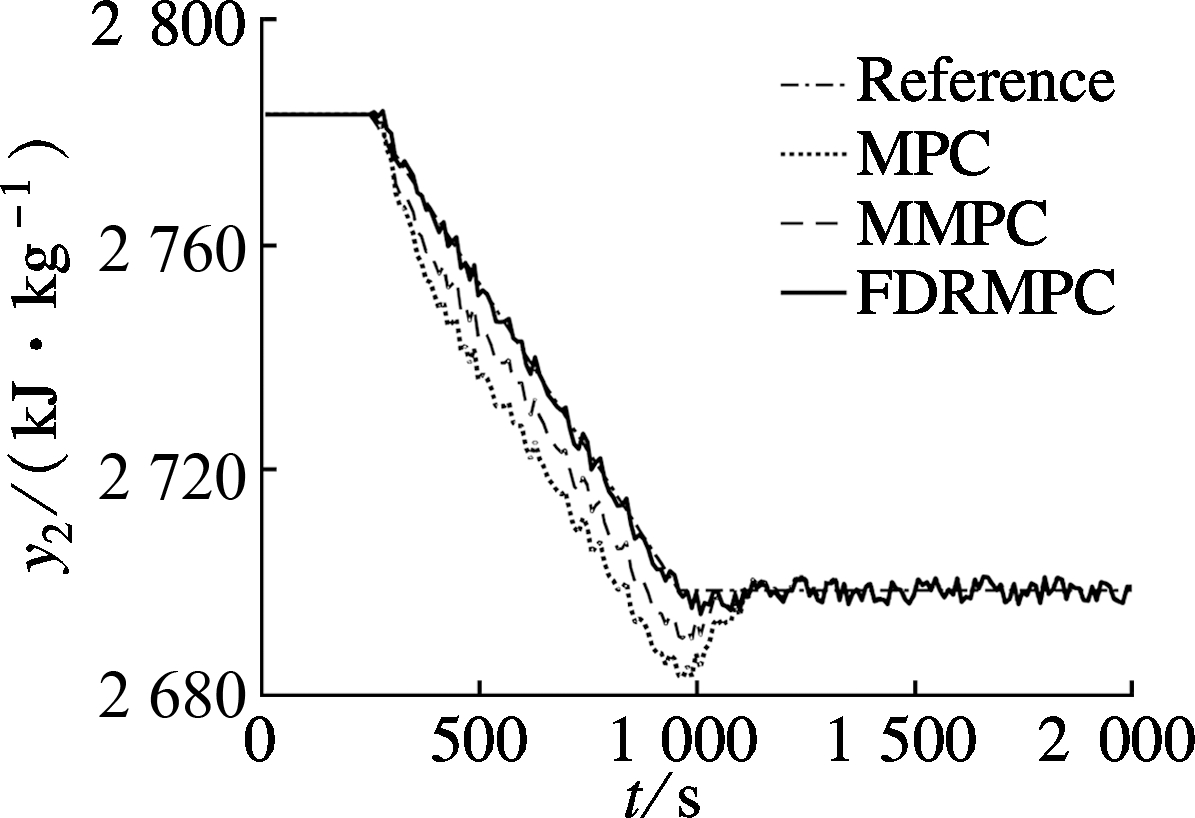
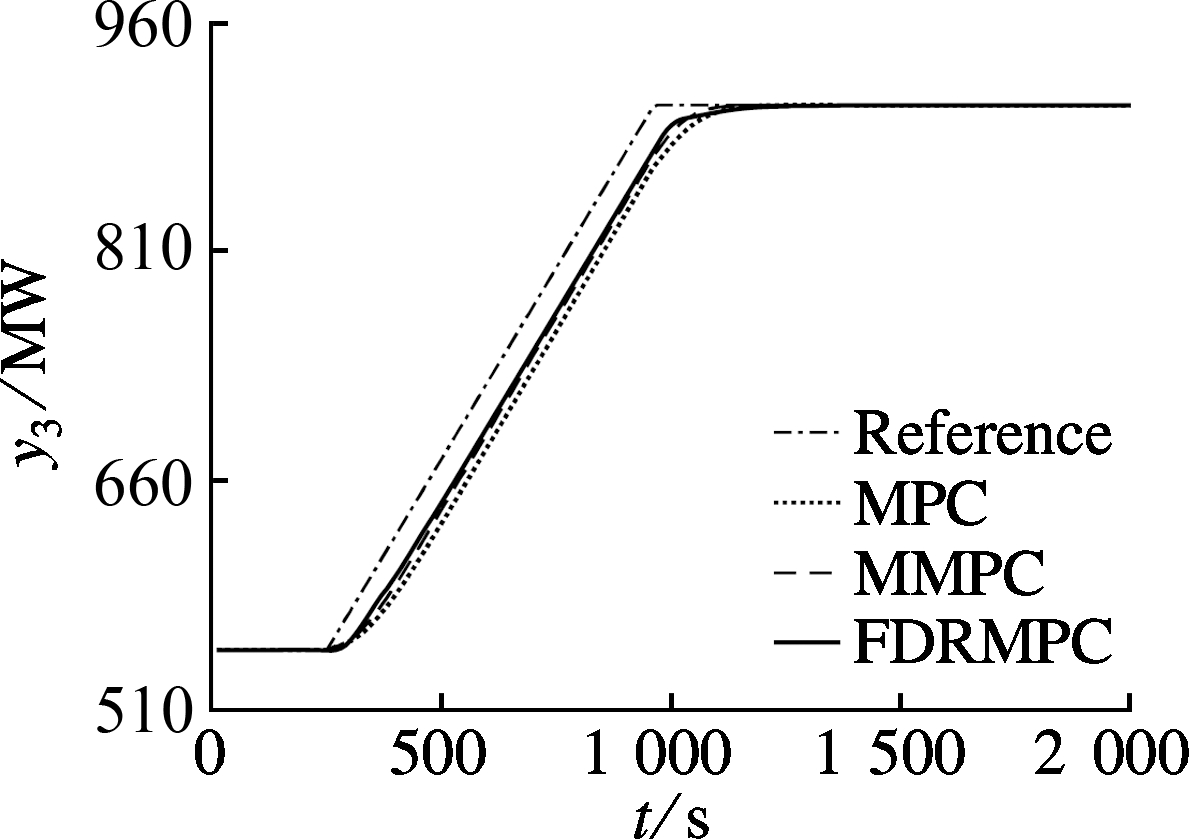
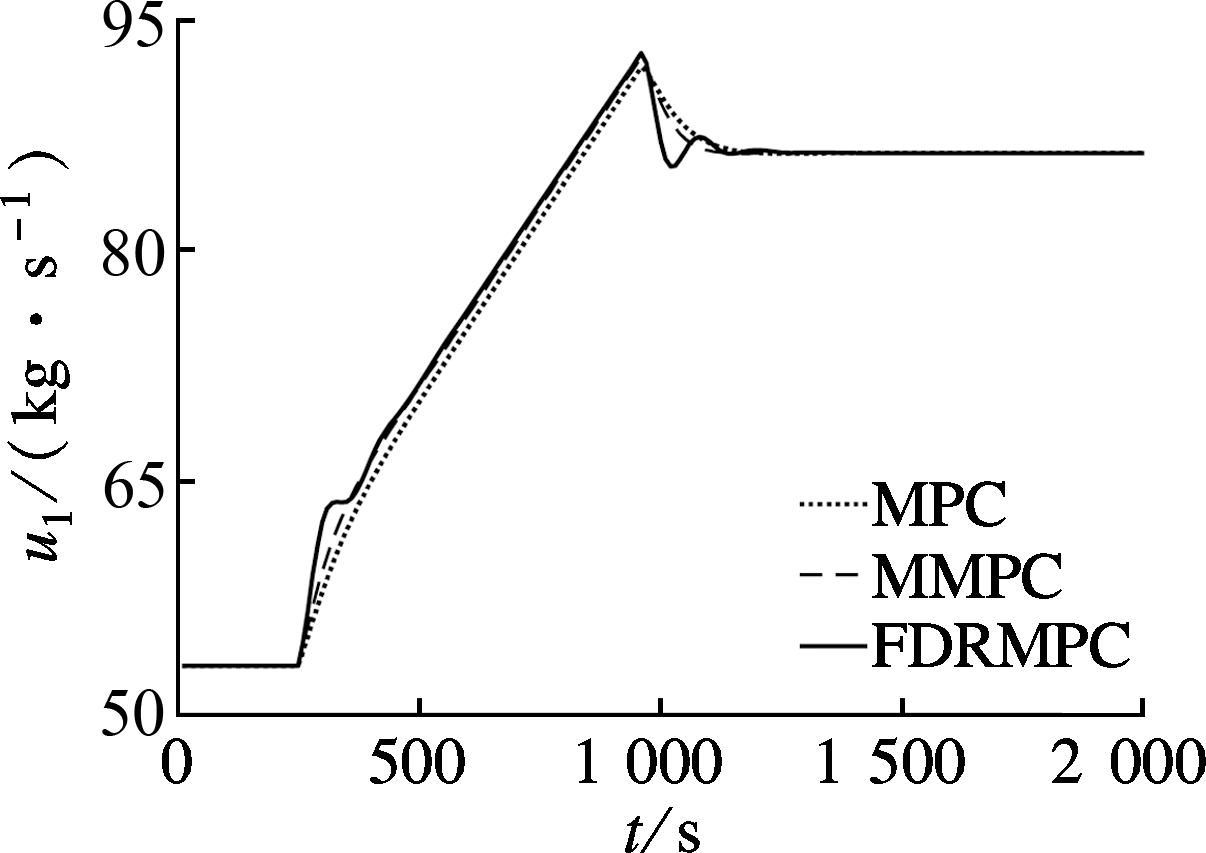
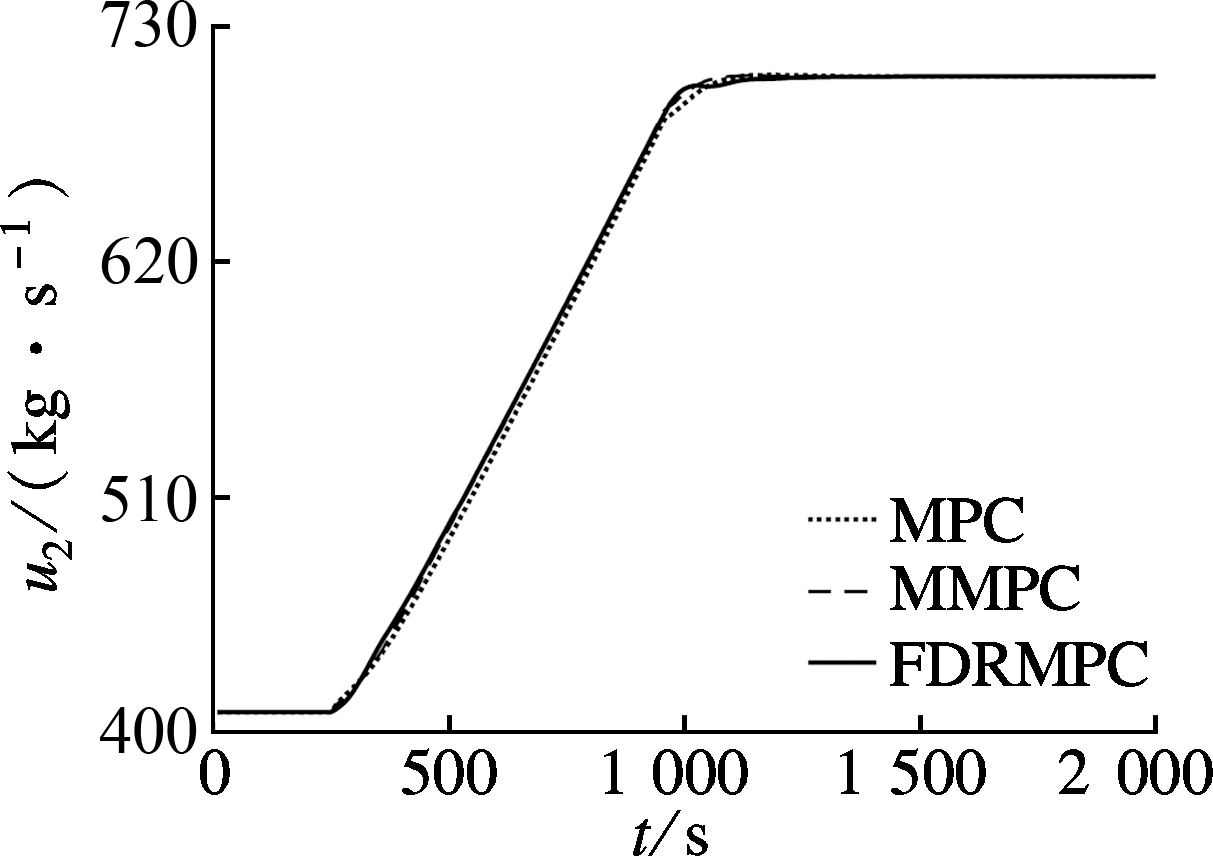
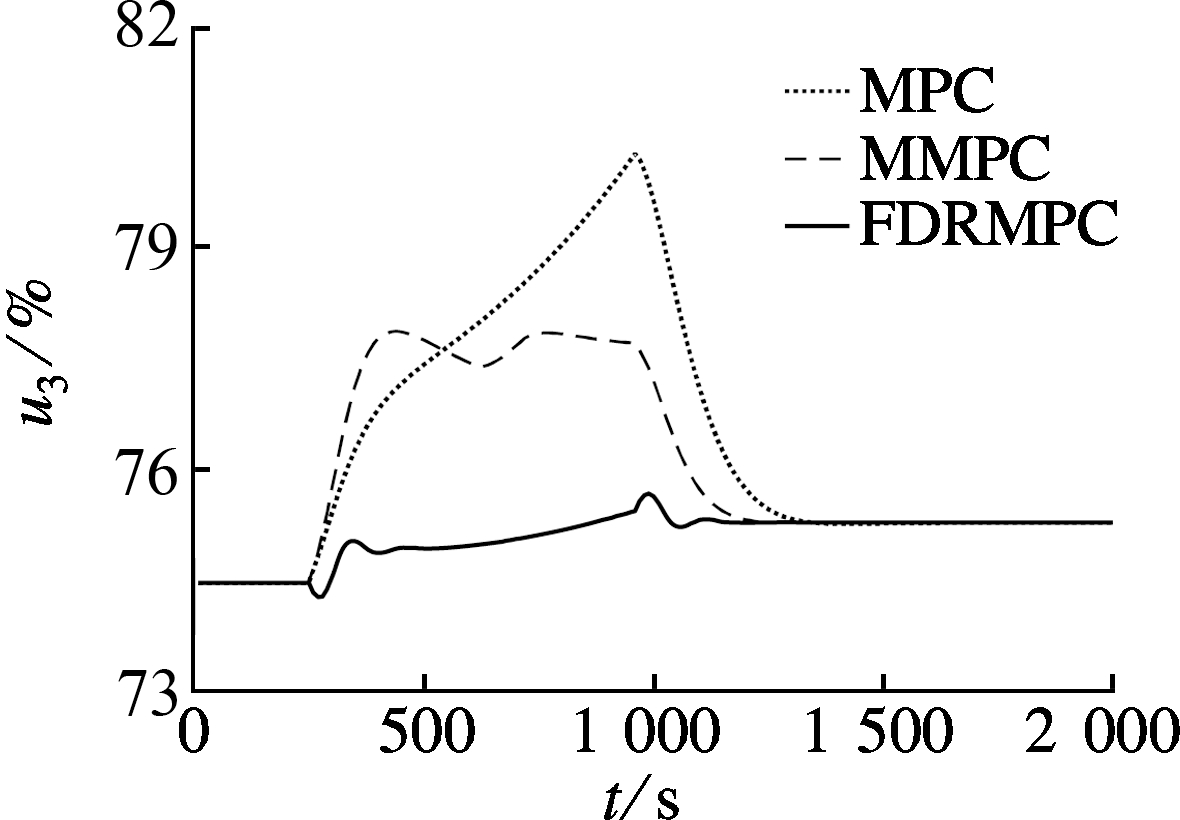
The first case is designed to show the performance of controllers over a wide operation range. It is supposed that from t=250 s to t=960 s, the operating point changes linearly from 1# (13.7 MPa, 2 783.0 kJ/kg, 550.1 MW) to 5# (22.7 MPa, 2 698.7 kJ/kg, 905.9 MW). Measurement noises on y1 and y2 are also taken into consideration. The proposed FDRPC is compared with the nominal model-based predictive controller (MPC) and the multi-model predictive controller (MMPC)[15] with the same control parameters. The simulation results are shown in Fig.3.
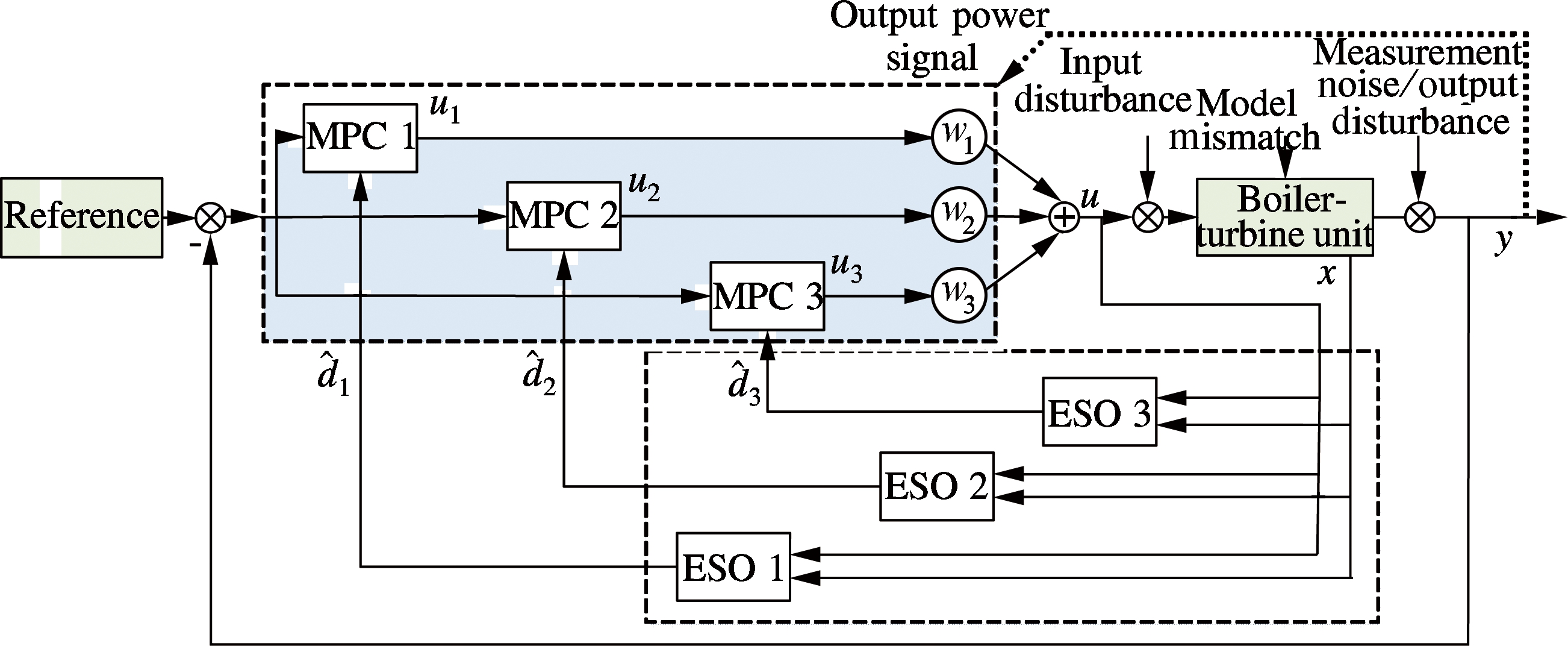
Fig.2 Schematic diagram of the proposed FDRPC
(a)
(b)
(c)
(d)
(e)
(f)
Fig.3 Wide-range load tracking control of the boiler-turbine unit under measurement noises. (a) Throttle steam pressure; (b) Separator steam enthalpy; (c) Output active power; (d) Fuel flow rate command; (e) Feedwater flow rate; (f) Turbine governor valve
The results show that the proposed FDRPC gives the most gratifying dynamic performance. The grid power demand can be tracked rapidly, meanwhile, the throttle steam pressure and separator steam enthalpy can reach their set-points with fewer deviations.
For the MPC method, the state-space model identified around the 6# operating condition is used in the controller design. Therefore, when the operating point deviates far from the nominal case, serious modeling mismatch occurs, resulting in a control performance degradation. For the MMPC method, since only three local linear models are used to approximate the dynamics of the boiler-turbine unit, there still remains modeling mismatches during the transition. This factor limits the performance of the MMPC.
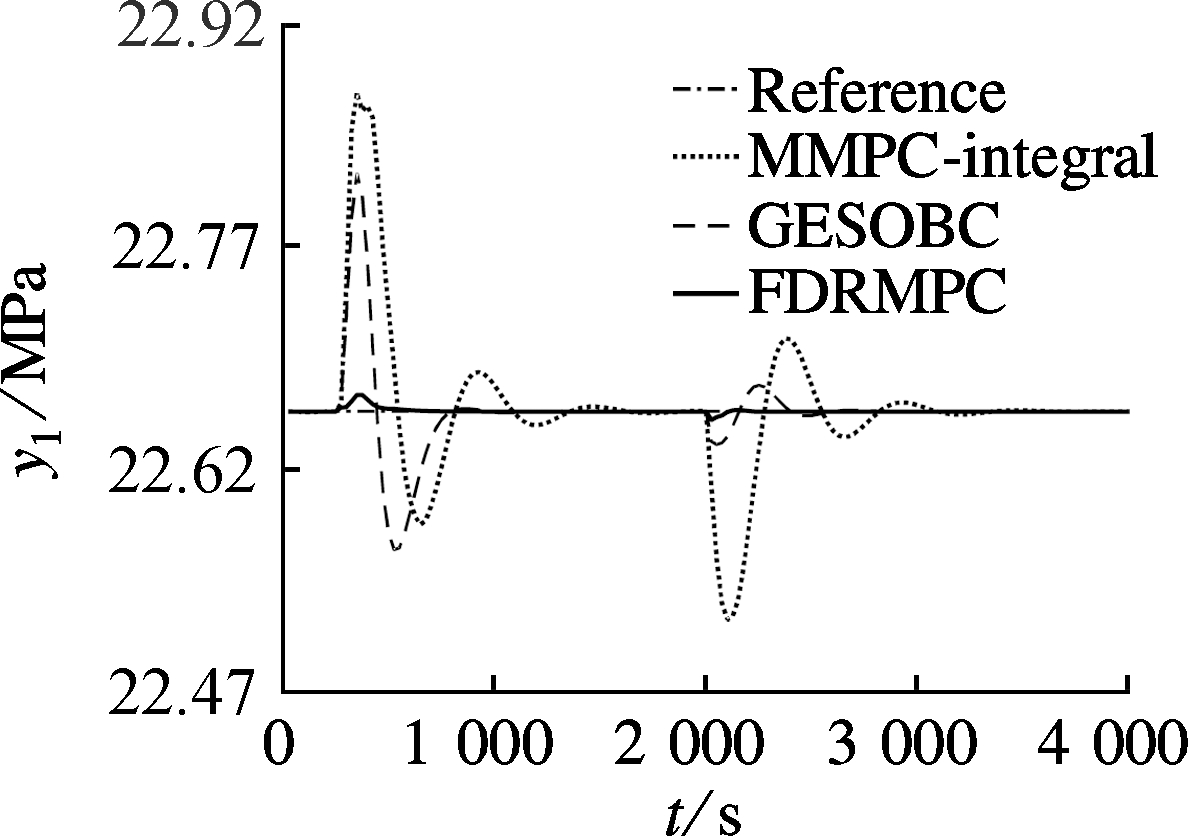
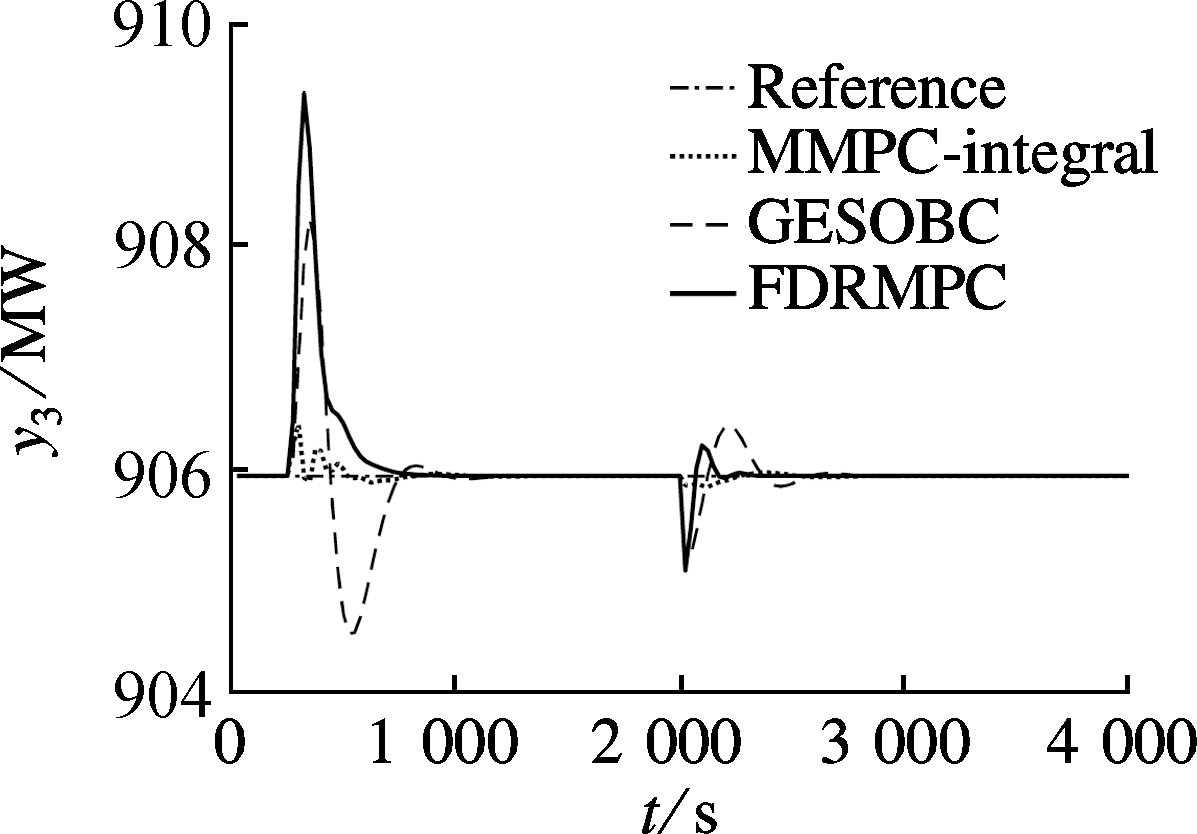
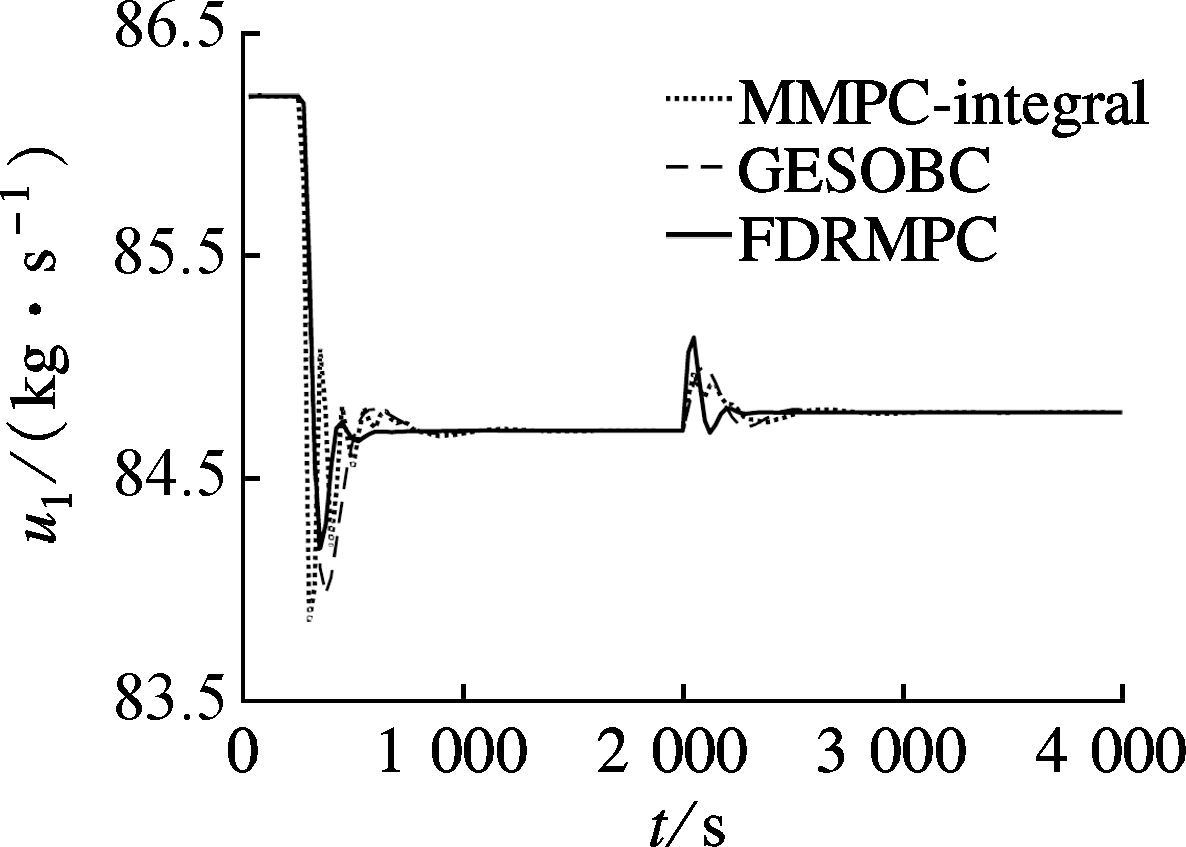
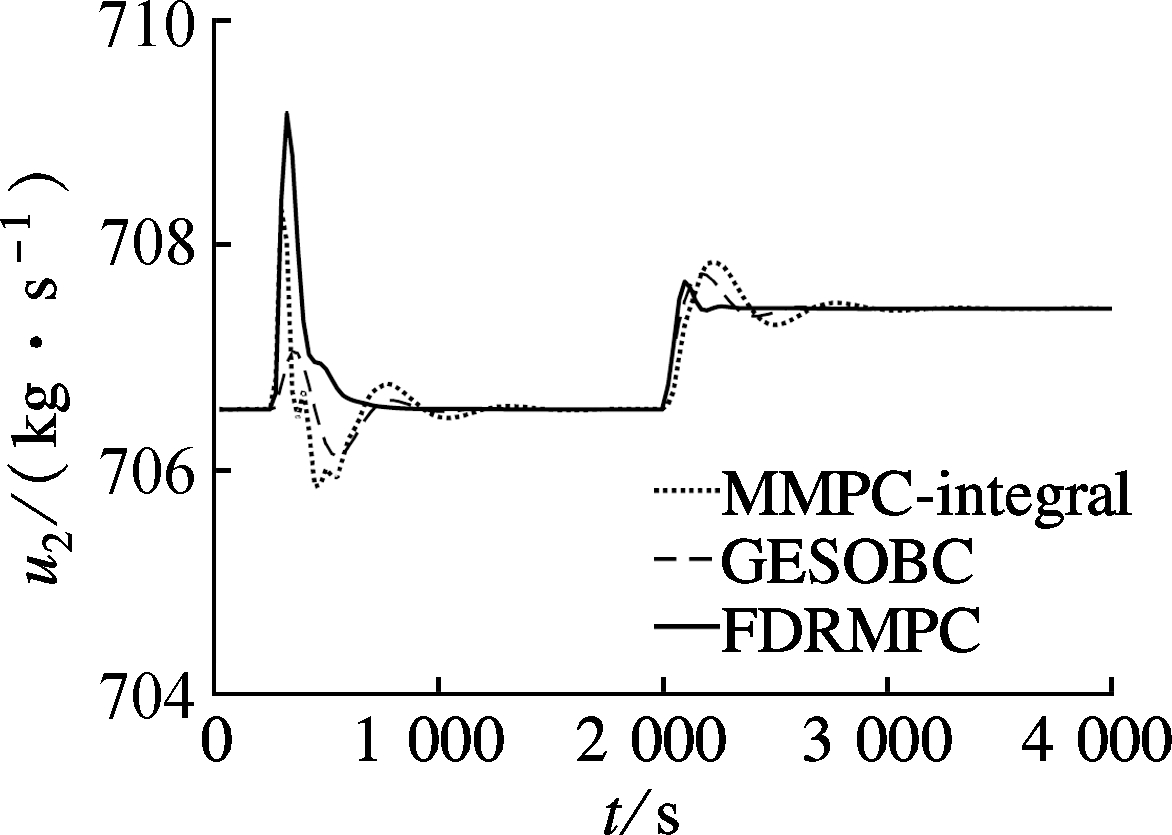
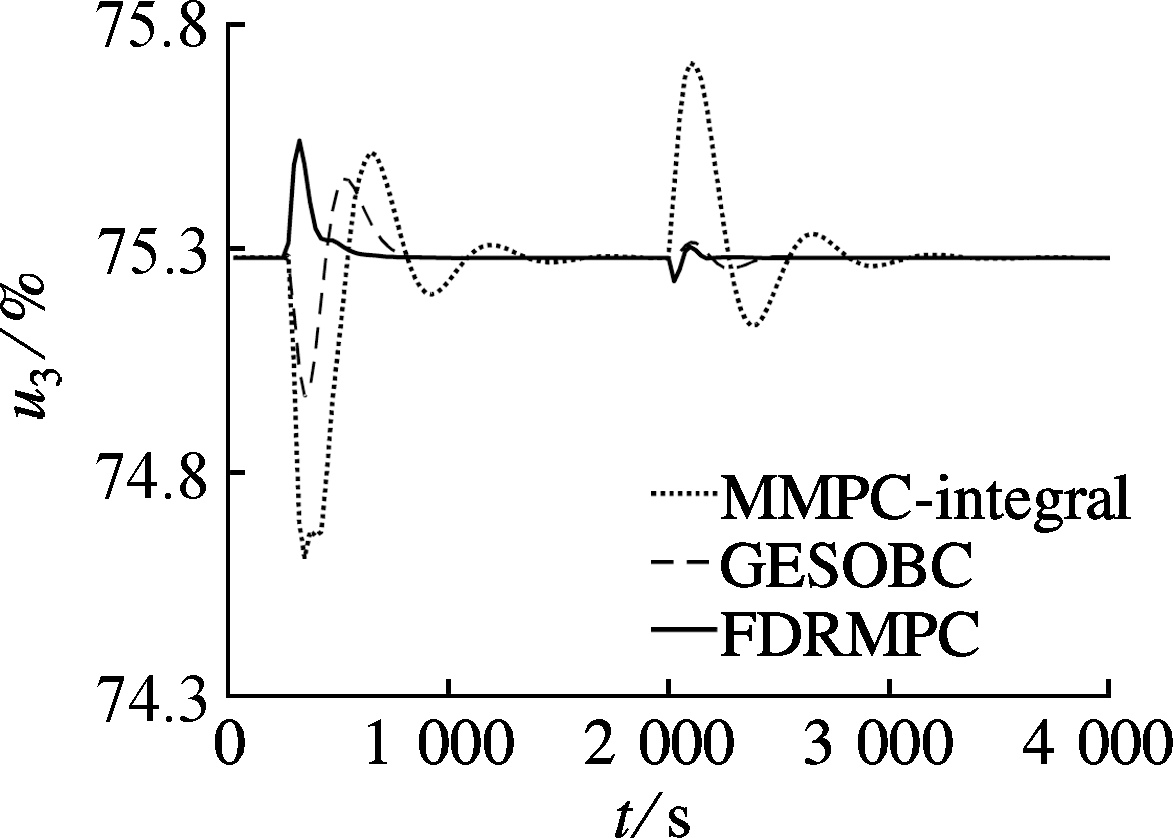
To further verify the advantages of FDRPC in disturbance rejection, another case is designed to consider significant unknown disturbances. The boiler-turbine unit is supposed to be operated at the steady-state condition 6#. At t=250 s, an unknown step-type disturbance d=1.5 kg/s acts upon the fuel flow rate channel, reflecting the variation of coal quality. Then at t=2 000 s, an unexpected plant behavior variation is taken into consideration, and all the parameters of nonlinear model (1) shrink to 99.5% of its original value, reflecting the influence of the combustion condition variations or coking in the boiler. The proposed FDRPC approach is compared with the MMPC with integral action (MMPC-integral)[16] and the generalized extended state observer based control (GESOBC)[17].
As can be seen in Fig.4, an offset-free tracking performance can be achieved by all these methods. Among them, the proposed FDRPC provides the best dynamic performance with a smaller overshoot and less transient time. Moreover, the closed-loop stability and input constraints can be satisfied with the design of FDRPC.
(a)

(b)
(c)
(d)
(e)
(f)
Fig.4 Disturbance rejection performance for the boiler-turbine unit. (a) Throttle steam pressure; (b) Separator steam enthalpy; (c) Output active power; (d) Fuel flow rate command; (e) Feedwater flow rate; (f) Turbine governor valve
The GESOBC can also achieve a satisfactory disturbance rejection performance. However, the stability relies on the tuning of feedback gain, which cannot be guaranteed during the design stage, particularly when the input constraints are taken into consideration. The results also show that without using the ESO technique, the setting time of MMPC-integral is longer than that of FDRPC due to the feature of integral action.
To overcome the nonlinearity and disturbance issues of the boiler-turbine unit, this paper proposes a novel FDRPC approach through the combination of the extended state observer and fuzzy model predictive control. Local state-space models are established on the basis of nonlinearity analysis and subspace identification. Local MPCs are then devised, in which the disturbances estimated by the ESOs are taken into account to make the prediction more accurate. Since the disturbance estimation is utilized within the MPC formulation, this design will improve the disturbance rejection property of MPC without breaking the optimality of the predictive control system, particularly when the constraints in the process are involved. The local predictive controllers are then combined into the FDRPC to attain a wide-range load following control. The effectiveness of the proposed FDRPC is demonstrated through the simulations of the boiler-turbine unit of a 1 000 MW USPP.
[1]Wu X, Shen J, Li Y, et al. Steam power plant configuration, design, and control[J]. Wiley Interdisciplinary Reviews: Energy and Environment, 2015, 4(6): 537-563. DOI: 10.1002/wene.161.
[2]Hou G, Xi Y, Liu J, et al. Simulation research of the multi-variable generalized predictive control in 500 MW unit plant coordinated control system[C]//The 2011 International Conference on Advanced Mechatronic Systems. Zhengzhou, China, 2011: 196-201.
[3]Liu X, Guan P, Chan C. Nonlinear multivariable power plant coordinate control by constrained predictive scheme[J]. IEEE Transactions on Control Systems Technology, 2010, 18(5): 1116-1125. DOI: 10.1109/TCST.2009.2034640.
[4]Wu X, Shen J, Li Y, et al. Hierarchical optimization of boiler-turbine unit using fuzzy stable model predictive control[J]. Control Engineering Practice, 2014, 30: 112-123. DOI: 10.1016/j.conengprac.2014.03.004.
[5]Wu X, Shen J, Li Y, et al. Fuzzy modeling and stable model predictive tracking control of large-scale power plants[J]. Journal of Process Control, 2014, 24(10): 1609-1626. DOI: 10.1016/j.jprocont.2014.08.007.
[6]Wu X, Shen J, Li Y, et al. Data-driven modeling and predictive control for boiler-turbine unit using fuzzy clustering and subspace methods[J]. ISA Transactions, 2014, 53(3): 699-708. DOI: 10.1016/j.isatra.2013.12.033.
[7]Dong J, Sun L, Li D. Flexible active disturbance rejection control for boiler-turbine unit[J]. Journal of Central South University (Science and Technology), 2015, 46(9): 3503-3512.
[8]Tan W, Fang J, Fu C. Linear active disturbance rejection controllers (LADRC) for boiler-turbine units[C]//32nd Chinese Control Conference. Xi’an, China, 2013: 5339-5344.
[9]Zhang R Q, Ma L Y, Ma Y G, et al. Active disturbance rejection control of once-through boiler unit coordinated system based on pseudo-diagonalization[C]//2015 54th Annual Conference of the Society of Instrument and Control Engineers of Japan (SICE). Hangzhou, China, 2015: 928-933. DOI: 10.1109/SICE.2015.7285555.
[10]Madoński R, Herman P. Survey on methods of increasing the efficiency of extended state disturbance observers[J]. ISA Transactions, 2015, 56: 18-27. DOI: 10.1016/j.isatra.2014.11.008.
[11]Liu J Z, Yan S, Zeng D L, et al. A dynamic model used for controller design of a coal fired once-through boiler-turbine unit[J]. Energy, 2015, 93, Part 2: 2069-2078. DOI: 10.1016/j.energy.2015.10.077.
[12]Anderson B D, Brinsmead T S, De Bruyne F, et al. Multiple model adaptive control. Part 1: Finite controller coverings[J]. International Journal of Robust and Nonlinear Control, 2000, 10(11/12): 909-929. DOI: 10.1002/1099-1239(200009/10)10:11/12<909::AID-RNC532>3.0.CO;2-Z.
[13]van Overschee P, de Moor B. Subspace identification for linear systems: Theory, implementation, applications[M]. Springer Science & Business Media, 2012. DOI: 10.1007/978-1-4613-0465-4.
[14]Feng G. A survey on analysis and design of model-based fuzzy control systems[J]. IEEE Transactions on Fuzzy Systems, 2006, 14(5): 676-697. DOI: 10.1109/TFUZZ.2006.883415.
[15]Wang G, Yan W, Chen S, et al. Multi-model predictive control of ultra-supercritical coal-fired power unit[J]. Chinese Journal of Chemical Engineering, 2014, 22(7): 782-787. DOI: 10.1016/j.cjche.2014.05.005.
[16]Zhang R, Xue A, Wang S, et al. An improved model predictive control approach based on extended non-minimal state space formulation[J]. Journal of Process Control, 2011, 21(8): 1183-1192. DOI: 10.1016/j.jprocont.2011.06.009.
[17]Li S, Yang J, Chen W H, et al. Generalized extended state observer based control for systems with mismatched uncertainties[J]. IEEE Transactions on Industrial Electronics, 2012, 59(12): 4792-4802. DOI: 10.1109/TIE.2011.2182011.
References:
摘要:为了同时克服超超临界机组机炉协调系统的大范围负荷跟踪和扰动抑制问题,提出了一种利用模糊调度、模型预测控制及扩张状态观测器等技术的模糊抗扰动预测控制方法.首先,在非线性度分析和子空间辨识的基础上,建立受控对象的局部状态空间模型.为了增强控制器的扰动抑制性能,采用扩张状态观测器估计未知扰动和模型失配.然后,利用估计出来的扰动,设计基于局部模型的局部预测控制器并通过模糊调度技术将它们结合成模糊预测控制系统以进一步提高性能.仿真结果表明,所提模糊抗扰动预测控制器能够在负荷大范围变化时取得较好的跟踪性能,同时对于扰动产生的不良影响具有抑制能力.
关键词:超超临界机组;模型预测控制;模糊控制;扩张状态观测器
中图分类号:TP391
Foundation items:The National Natural Science Foundation of China (No.51506029, 51576041), the Natural Science Foundation of Jiangsu Province (No.BK20150631), China Postdoctoral Science Foundation.
Citation::Zhang Fan, Wu Xiao, Shen Jiong. Fuzzy disturbance rejection predictive control of ultra-supercritical once-through boiler-turbine unit[J].Journal of Southeast University (English Edition),2017,33(1):53-58.
DOI:10.3969/j.issn.1003-7985.2017.01.009.
DOI:10.3969/j.issn.1003-7985.2017.01.009
Received 2016-10-16.
Biographies:Zhang Fan (1986—), male, graduate; Shen Jiong (corresponding author), male, doctor, professor, shenj@seu.edu.cn.