Abstract:In order to imitate biological adhesion performance and skin properties, phase transitions on dielectric elastomers (DE) with high voltages are studied. The states of flat, wrinkled and bulging on the circular active area which is coated with electrodes verify the theoretical prediction of phase transitions and failure phenomena. When the DE membrane is subjected to a radial force and increasing voltage, four experimental phenomena are discovered before electric breakdown: The active region expands, and the thin membrane is still flat till breakdown; bulging forms instead of a flat area on the membrane; wrinkles and bulging coexist; and the active area is completely wrinkled. In the fourth state, there are two types of phase transitions between the flat and wrinkled regions in a membrane: Wrinkles form in small regions, and then propagate at the expense of the flat area until the entire active part becomes wrinkled; both the wrinkled and flat regions move interchangeably on a membrane with ramping voltage till breakdown. It is found that when there is no prestretch of a DE membrane, bulging will occur with the increasing voltage. Wrinkles commonly appear at large prestretch and, therefore, the prestretched ratio significantly affects electromechanical phase transitions.
Key words:phase transition; dielectric elastomer; wrinkle; circular frame
Robust electromechanical transductions, especially muscle-like actuators, have been developed rapidly in the past decade. However, suitably designed transducers can be operated on the edge of the electromechanical instability (EMI). Voltage induces large deformation prior to electric breakdown (EB)[1-2], and large axial displacement is obtained from the electric field strength. At a certain voltage, local regions on a membrane undergo EMI and become thin, but the deformation of thin regions is constrained by surrounding thick regions, and then wrinkles propagate in thin regions[3]. Such transition may enable applications in energy harvesting, adhesion (such as geckos’ feet, skin surface)[4], and stretchable electronics[5], etc.
A dielectric elastomer (DE) membrane sandwiched between two compliant electrodes is a deformable capacitor. When the part with electrodes on the membrane surface is applied with voltage, its thickness decreases, and the electric field increases according to C=![]() . If this positive feedback spreads over the DE material, the film will become unstable drastically. This kind of EMI often leads to electric breakdown[6-8] which may be suppressed or eliminated by prestretch to enhance the actuation strain of dielectric elastomers.
. If this positive feedback spreads over the DE material, the film will become unstable drastically. This kind of EMI often leads to electric breakdown[6-8] which may be suppressed or eliminated by prestretch to enhance the actuation strain of dielectric elastomers.
Wrinkles form on the prestretched membrane surface locally, and flat and wrinkled regions coexist[9]. Keplinger et al.[10] observed the propagation of wrinkles in a dielectric elastomer, which meant that the flat area decreased at the expense of the wrinkled area. Zhu et al.[3] studied a clamped DE membrane which was subject to a vertical dead load, and identified continuous and discontinuous phase transitions. Mao et al.[11] studied the nucleation and propagation of wrinkles in an inflated DE membrane mounted onto an air chamber and found that the location and patterns of wrinkles depended on the initial gas pressure and the step voltage applied.
In existing literature, coexistent flat and wrinkled states are difficult to study experimentally because observed patterns are complicated, and EMI (such as wrinkle, bulging) states often suffer EBs. In this paper, experiments are conducted on circular membranes whose boundary are fixed to a rigid frame. An analytical model is utilized to interpret the experimental phenomena, and the effect of prestretch on electromechanical phase transition is analyzed.
The dielectric elastomer circular structure is axisymmetric as shown in Fig.1. It consists of acrylic VHB (3M), active electrodes and a circular rigid frame, etc. At the reference state, the radius of the active region with electrodes is A, and the radius of the passive region without electrodes is B. The radius of an arbitrary point is R. When the active region is subject to a prestretch λpre which is varied to test the behavior of the actuator, the membrane will deform to a state of equilibrium. Then, the radius of the passive part will change to Bλpre, and the radius of the active region will change to Aλpre. The radius of the arbitrary point in the membrane will change to Rλpre from R (see Fig.1(a)).

(a) (b)
Fig.1 The schematics of a circular dielectric elastomer actuator. (a) Prestreched state; (b) Actuated state
λr, λθ, λh are the stretches in radial, hoop, and thickness directions. There is λθλrλh=1 due to the incompressible material, so λh=![]() . As shown in Fig.1(b), when the membrane is subject to a voltage, the active part expands to radius a, the passive part changes to b, and the radius R reaches r. The passive part decreases in area. The boundary of the membrane is fixed to a rigid frame. When the active part suffers a radial expanding force with voltage, the passive part shrinks. The radial and hoop stretch of the active part are the same, and they are both equal to λA. a=AλA and b=Bλpre.
. As shown in Fig.1(b), when the membrane is subject to a voltage, the active part expands to radius a, the passive part changes to b, and the radius R reaches r. The passive part decreases in area. The boundary of the membrane is fixed to a rigid frame. When the active part suffers a radial expanding force with voltage, the passive part shrinks. The radial and hoop stretch of the active part are the same, and they are both equal to λA. a=AλA and b=Bλpre.
Because the passive region undergoes inhomogeneous and unequal-biaxial deformation, the hoop stretch λθ is given as ![]() , where r is the function of R. Due to the symmetry in geometry and tensile force, the function r is independent. For a cylinder coordinate system, with reference to Fig.1(b), an equilibrium equation is
, where r is the function of R. Due to the symmetry in geometry and tensile force, the function r is independent. For a cylinder coordinate system, with reference to Fig.1(b), an equilibrium equation is ![]() +
+![]()
![]() +
+![]() +br=0, where σr, σθ and σh are the triaxial true stresses in the radial, hoop and thickness directions. Nominal stresses[12] can be written as Sr=
+br=0, where σr, σθ and σh are the triaxial true stresses in the radial, hoop and thickness directions. Nominal stresses[12] can be written as Sr=![]() , Sθ=
, Sθ=![]() , Sh=
, Sh=![]() , and br is 0 in this structure, so the mechanical equilibrium becomes
, and br is 0 in this structure, so the mechanical equilibrium becomes ![]() +
+![]() =0[13]. Then, we obtain
=0[13]. Then, we obtain ![]() =
= .
.
We define the nominal density of the Helmholtz free energy by W that is prescribed as a function of four independent variables W=W(λθ,λr,λh,D). The true electric displacement is D=![]() =Eε, where E represents the electric field intensity, and ε is the permittivity. There is σr+εE2=λr
=Eε, where E represents the electric field intensity, and ε is the permittivity. There is σr+εE2=λr![]() . Based on the no-slip displacement boundary condition, when the voltage is zero, λθ=λpre, and the inner boundary is at the interface (r=a, σθ=σr).
. Based on the no-slip displacement boundary condition, when the voltage is zero, λθ=λpre, and the inner boundary is at the interface (r=a, σθ=σr).
At a certain value of voltage, the nominal radial stress SA vanishes, and then dynamic patterns nucleate on the membrane. This phenomenon is known as loss of tension (LT). According to the Gent model, the active part in the DE thin membrane is governed by εE2=λA×![]() .
.
Fig.2 shows that voltage is a function of stretch (λA). For a membrane, B/A=2 and λpre=3, the material parameters of a DE membrane used in the calculations are as follows: Shear modulus μ is 40 kPa; the thickness H is 1 mm; the stretch limit Jlim is 125; ε=4.12×10-11 F/m, which are obtained by fitting experimental records. The region A experiences LT before it undergoes EB which is denoted by a solid dot at a critical voltage, EEB=![]() . At a critical voltage which is represented by an asterisk in Fig.2, SA vanishes and wrinkles appear. After that, the membrane suffers electrical breakdown. The curve in Fig.2 first goes up, corresponding to the flat state, and then goes down, corresponding to the flat and wrinkled coexisting state. Finally, the curve goes up again (wrinkled state) due to the strain-stiffening effect till EB occurs.
. At a critical voltage which is represented by an asterisk in Fig.2, SA vanishes and wrinkles appear. After that, the membrane suffers electrical breakdown. The curve in Fig.2 first goes up, corresponding to the flat state, and then goes down, corresponding to the flat and wrinkled coexisting state. Finally, the curve goes up again (wrinkled state) due to the strain-stiffening effect till EB occurs.

Fig.2 The calculation results for the DE membrane
Voltages will induce expanding stress in the active region that is covered with a mixture of silicone oil and carbon black. Surface electrodes are homogenous and highly conductive. A VHB membrane is attached to a rigid frame (circular radius 6 cm) and connected to electrodes via two pieces of copper tape. A small ramp rate (20 V/s) of voltage is used to minimize the viscoelastic effect. When the voltage is small, the active part expands due to the voltage-induced Maxwell stresses, while the passive part decreases in area. Dynamic patterns including flat, bulging and wrinkles are also observed.
During the experimental process of actuation, four experimental phenomena are discovered before electric breakdown. The first state (State Ⅰ) is that the active region A expands against the passive region B, and the membrane is still flat when electrical breakdown occurs (see Fig.3(a)), the inner diameter of the rigid frame is 6 cm, B/A=2, H=1 mm and λpre=2. The second state (State Ⅱ, Fig.3(b)) is that bulging forms in some regions, and the membrane (λpre=1) undergoes phase transition from the flat to bulging. When the voltage further increases, the membrane suffers electrical breakdown because the local electric field reaches the dielectric strength. Bulging is induced by compressive stresses coming from the passive part in the VHB membrane or the rigid frame.
(a)
(b)
Fig.3 Experimental phenomena. (a) State Ⅰ; (b) State Ⅱ
The third state (State Ⅲ) is that wrinkled and bulging parts coexist (see Fig.4). The membrane has a larger radial prestretch, λpre=4.5, B/A=2. Phase transitions are from the flat state to the wrinkled and bulging coexisting state, showing the electromechanical behavior. The membrane first expands; when the voltage increases to a critical value (6.2 kV), wrinkles nucleate close to the periphery of active region, and then other parts of the membrane form bulging. Wrinkled parts and bulging parts coexist at 6.6 kV.
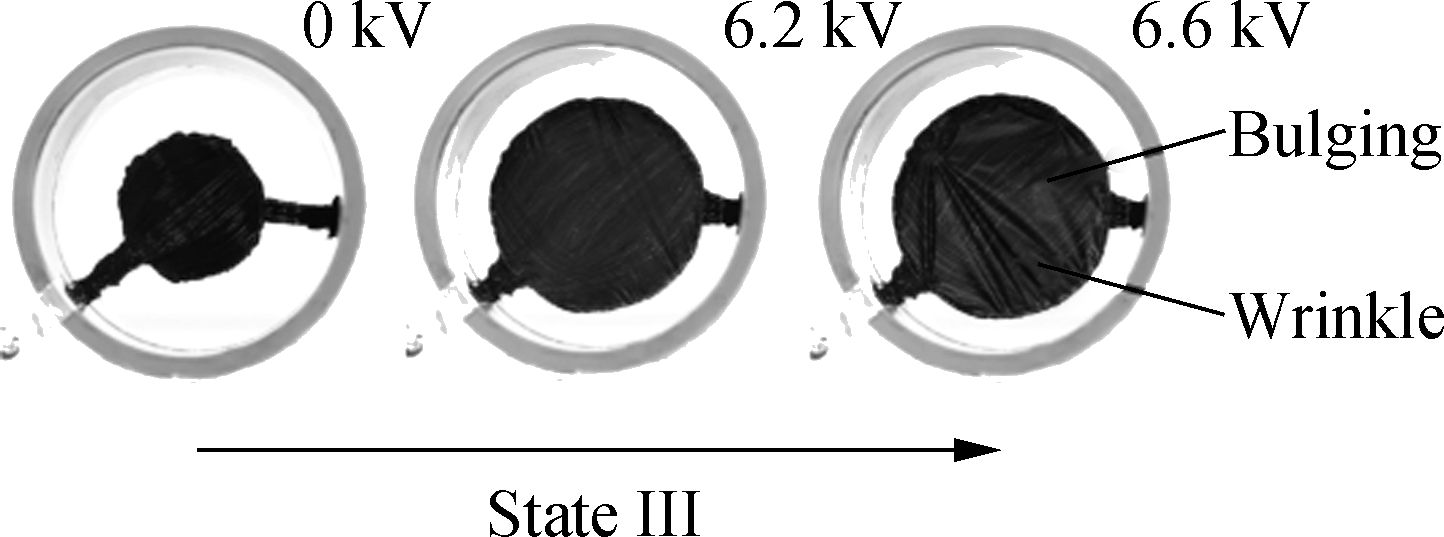
Fig.4 State Ⅲ phase transition from the flat state to bulging and wrinkled coexisting state
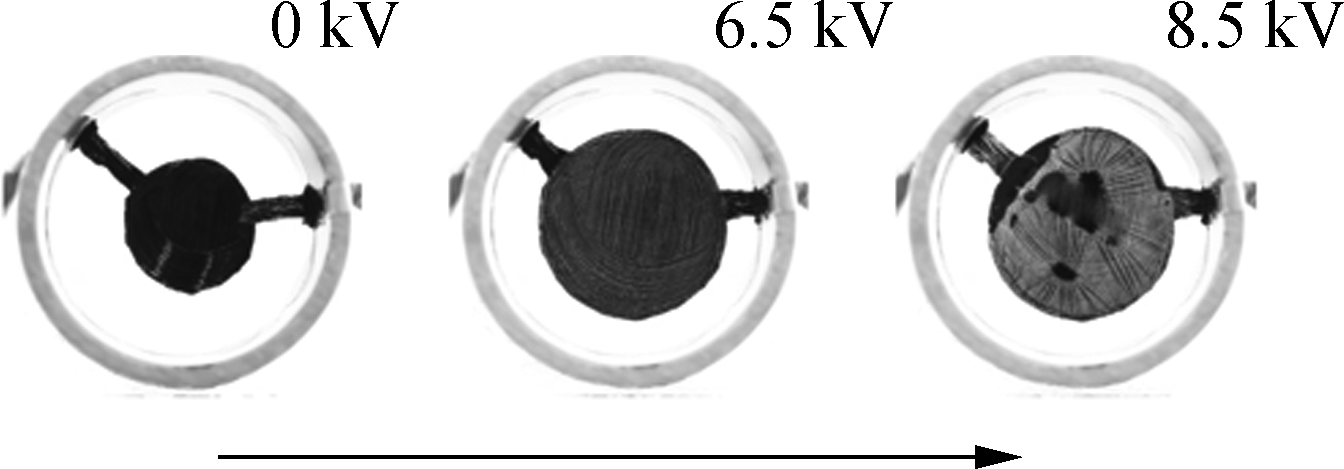
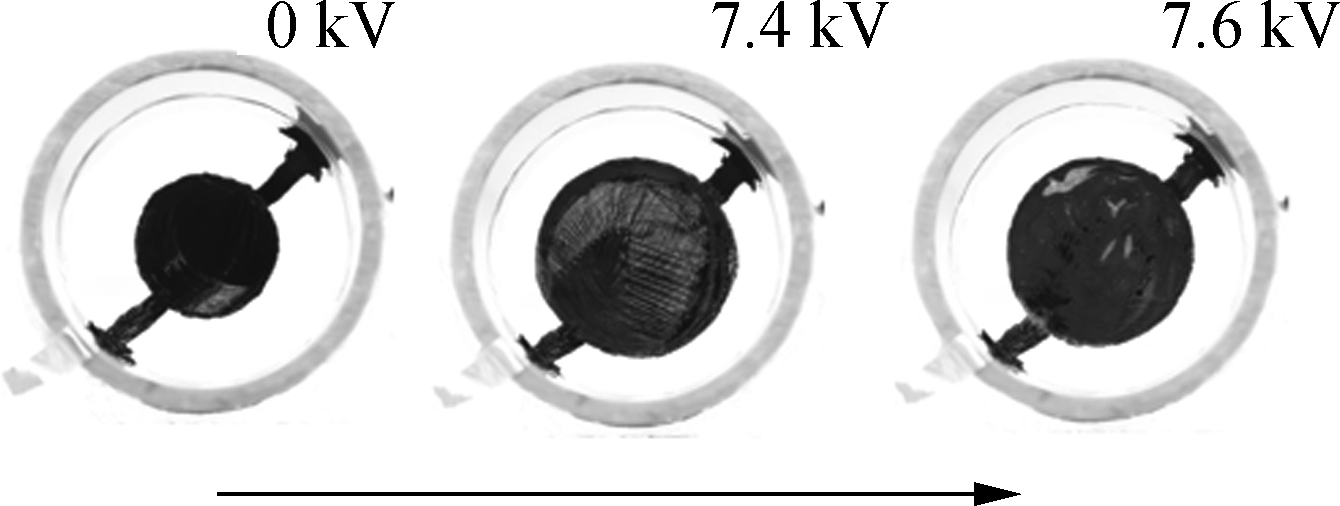
The fourth state (State Ⅳ) is that wrinkles form without bulging. Wrinkle patterns look much more complex due to the concentric stress imposed on the active part. Additionally, two different types of phase transitions exist in the fourth state (see Fig.5). One type (State Ⅳ-Ⅰ, Fig.5(a)) is that wrinkles form in small regions, and the flat membrane with B/A=2, H=1 mm and λpre=4 is used. At the actuated state, the growth of the wrinkled regions is at the expense of the flat regions until the entire active region becomes wrinkled, and the process is a continuous phase transition in a short time span. The other type (State Ⅳ-Ⅱ) is shown in Fig.5(b), and both wrinkled and flat regions move interchangeably on the membrane surface (λpre=3). Wrinkles of different wavelengths also move interchangeably till breakdown. The process can be explained as follows: As charges on the electrodes vary, the flat regions have smaller stretch, while the wrinkled regions have larger stretch. As a result, the phase transition process is discontinuous.
(a)
(b)
Fig.5 Wrinkles form without bulging. (a) State Ⅳ-Ⅰ dynamic patterns; (b) State Ⅳ-Ⅱ dynamic patterns
1) Four states of phase transition caused by loss of tension in a circular DE membrane are reported. The prestretch is found to greatly affect the electromechanical behavior of DE membranes: A membrane with a small prestretch can exhibit bulging patterns, and lager prestretch induces wrinkled patterns. Additionally, both flat and wrinkled regions can move interchangeably on the membrane surface during the phase transition process.
2) An analytical model is developed to interpret loss of tension and electrical breakdown. Theoretical calculations are used for conducting experiments, and the parameters in the theory are obtained by fitting experimental records.
3) This research on phase transitions may pave the way for future applications, such as on-demand patterns for micro fluidics, adhesion and flexible electronics.
References
[1]Zhao X H, Suo Z G. Theory of dielectric elastomers capable of giant deformation of actuation[J]. Physical Review Letters, 2010, 104(17): 178302. DOI:10.1103/PhysRevLett.104.178302.
[2]Shen X, Ji S, Chen Y. Manufacture of large displacement antiferroelectric ceramic and its properties [J]. Journal of Southeast University (English Edition), 2004, 20(2): 205-208.
[3]Zhu J, Kollosche M, Lu T, et al. Two types of transitions to wrinkles in dielectric elastomers[J]. Soft Matter, 2012, 8(34): 8840-8846. DOI:10.1039/c2sm26034d.
[4]Chan E P, Smith E J, Hayward R C, et al. Surface wrinkles for smart adhesion[J]. Advanced Materials, 2008, 20(4): 711-716. DOI:10.1002/adma.200701530.
[5]Khang D Y, Jiang H, Huang Y, et al. A stretchable form of single-crystal silicon for high-performance electronics on rubber substrates[J]. Science, 2006, 311(5758): 208-212. DOI:10.1126/science.1121401.
[6]Mockensturm E M, Goulbourne N. Dynamic response of dielectric elastomers[J]. International Journal of Non-Linear Mechanics, 2006, 41(3): 388-395. DOI:10.1016/j.ijnonlinmec.2005.08.007.
[7]Zhao X H, Suo Z G. Method to analyze electromechanical stability of dielectric elastomers[J]. Applied Physics Letters, 2007, 91(6): 061921. DOI:10.1063/1.2768641.
[8]Sun W F, Sun Z L, Yi Y B, et al. Gate breakdown of high-voltage P-LDMOS and improved methods [J]. Journal of Southeast University (English Edition), 2006, 20(1): 35-38.
[9]Plante J S, Dubowsky S. Large-scale failure modes of dielectric elastomer actuators[J]. International Journal of Solids and Structures, 2006, 43(25): 7727-7751. DOI:10.1016/j.ijsolstr.2006.03.026.
[10]Keplinger C, Kaltenbrunner M, Arnold N, et al. Capacitive extensometry for transient strain analysis of dielectric elastomer actuators[J]. Applied Physics Letters, 2008, 92: 192903.
[11]Mao G, Huang X, Diab M, et al. Nucleation and propagation of voltage-driven wrinkles in an inflated dielectric elastomer balloon[J]. Soft Matter, 2015, 11(33): 6569-6575. DOI:10.1039/c5sm01102g.
[12]Koh S J A, Li T F, Zhou J X, et al. Mechanisms of large actuation strain in dielectric elastomers[J]. Journal of Polymer Science Part B: Polymer Physics, 2011, 49(7): 504-515. DOI:10.1002/polb.22223.
[13]Godaba H, Zhang Z Q, Gupta U, et al. Dynamic pattern of wrinkles in a dielectric elastomer[J]. Soft Matter, 2017, 13(16): 2942-2951. DOI:10.1039/c7sm00198c.
摘要:为了模仿生物的附着功能和表面皮肤的纹理,对软材料介电弹性体(DE)上的相变转换进行了研究.圆形DE膜上涂有电极区域在电压作用下所呈现的平坦、褶皱或者膨胀凸起的状态,验证了相变转换与失效现象的理论预测.当介电弹性体膜受到径向力和逐渐递增的电压时,在介电失效之前会发生4种试验现象:膜上通电区域扩张,薄膜保持平坦直到破裂;从平坦状态转变为凸起状态;膜上褶皱部分和凸起部分共存;涂有电极区域完全转换为褶皱状态.在第4种现象中又存在2种情况:褶皱在膜上小区域内形成,然后逐渐增加直至膜上涂电极的区域全部变为褶皱;褶皱区域和平坦区域不断相互转换,直到电击穿.研究发现无预拉伸时,薄膜在不断增大的电压作用下膨胀凸起,而褶皱现象一般出现在较大的预拉伸作用下,因此预拉伸对介电弹性体的机电相变有着显著的影响.
关键词:相变转换;介电弹性体;褶皱;圆形框架
中图分类号:TH134
DOI:10.3969/j.issn.1003-7985.2017.04.001
Received 2017-06-23,
Revised 2017-09-26.
Biographies:Zhang Hui (1987—),female,graduate; Zhang Zhisheng(corresponding author), male, doctor, professor, oldbc@seu.edu.cn.
Foundation item:The National Natural Science Foundation of China No.51775108).
Citation:Zhang Hui, Zhang Zhisheng. Phase transitions of dielectric elastomers in a circular frame[J].Journal of Southeast University (English Edition),2017,33(4):387-390.
DOI:10.3969/j.issn.1003-7985.2017.04.001.