Wang Cong,Jiang Wei,Song Tiecheng,et al.Throughput optimization for multi-channel cooperative CR under reporting channel errors[J].Journal of Southeast University(English Edition) ,2020,36(03):241-245.[doi:10.3969/j.issn.1003-7985.2020.03.001]

为了克服信道衰落和噪声不确定性,利用协作频谱感知提高认知无线电网络的感知性能.考虑到协作频谱感知不完美上报信道会对检测性能造成不利影响,研究多信道协作频谱感知认知无线电上报信道错误下的吞吐量最大化问题.在确保所有主用户得到有效保护的前提下,通过联合优化感知时间、检测阈值和从用户指配,最大化从用户的平均吞吐量.为处理该非凸优化问题,首先推导了最佳能量检测阈值, 然后通过所提次佳贪婪算法获得了最佳感知时长和最佳从用户指配.分析和仿真结果表明,所提算法可在较低复杂度下获得与搜索算法相同的性能.研究还表明,在低信噪比环境下尤其应考虑不完美上报信道的影响,上报信道错误显著降低了协作频谱感知性能.
To overcome the problem of channel fading and noise uncertainty, cooperative spectrum sensing(CSS)is developed to enhance the sensing performance in cognitive radio networks(CRNs). Considering that the non-ideal reporting channels of CSS can cause an adverse impact on the detection performance, the throughput maximization problem for multi-channel CSS cognitive radio under reporting channel errors is investigated. While providing all the primary users with sufficient protection, the average throughput of secondary users(SUs)is maximized by jointly optimizing the sensing duration, detection threshold and SU assignment. To address the non-convex optimization problem, the optimal energy detection threshold is derived first. Then, a sub-optimal greedy algorithm is proposed to obtain the optimal sensing duration and the optimal SU assignment. Analysis and simulation results show that the proposed algorithm can output the same performance as the exhaustive search algorithm at a much lower level of complexity. It is also shown that the impact of imperfect reporting channels should be considered especially in low signal-to-noise ratio environments and the reporting channel errors significantly reduce the performance of CSS.
With the significant growth of various wireless applications, spectrum resources are becoming more scarce. Cognitive radio(CR)is proposed as a promising technology to improve the utilization of the radio frequency spectrum[1]. Opportunistic spectrum access is an important access means for CR, in which the secondary users(SUs)can opportunistically utilize the unused frequency bands that belong to the primary users(PUs). Therefore, spectrum sensing plays a crucial role in opportunistic spectrum access without causing detrimental interference with the PUs[2]. Recently, various spectrum sensing methods have been developed to conduct spectrum detection, such as coherent detection, feature detection and energy detection. In this paper, we focus on energy detection since it is simple and able to detect the primary signal without any prior information. However, due to the noise uncertainty, multipath fading or hidden terminal problem, these sensing methods inevitably suffer from unreliable sensing results. To improve the sensing reliability and accuracy, cooperative spectrum sensing(CSS)has attracted extensive attention and applications for CR[3-4].
CSS is an effective technique for mitigating the detrimental impacts of channel fading in CR[5-14]. In CSS, multiple SUs individually report their local sensing results to the FC, which makes a global decision to determine whether a PU is present in the authorized band. In Ref.[5], a sensing-throughput tradeoff problem for the CSS scenario was formulated to find the optimal sensing time and the fusion threshold k that maximize the throughput of the SUs, but it did not consider the reporting channel errors between the SUs and the FC. The optimal N-out-of-K rule over imperfect reporting channels were derived by Banavathu et al.[6] for heterogeneous CRNs.However, they did not consider the protection constraint for the PU. The throughput of CRNs with CSS using the m-out-of-K rule was maximized by optimizing the m value and the K value while guaranteeing sufficient protection for the PU[7], but they did not optimize the spectrum sensing parameters. A fusion rule based on dynamic grouping was proposed for the distributed CSS in heterogeneous CRNs, where the SUs in different groups were assigned different weights to achieve information fusion[8], whereas the authors assumed that no burst errors were present in the reporting channels.
The above works[5-8] are mainly concerned with the user cooperation in a single-channel scenario, whereas practical CR usually has multiple PU channels that can be utilized by SUs. Therefore, joint sensing of multiple channels is necessary in CRNs as it can provide more transmission opportunities for SUs and thus improve the system throughput. Considering the variety of sensing performances and channel utilizations for a multi-channel scenario,Huang et al.[9] studied the optimization of the cognitive terminal assignment strategy in the coordinated spectrum sensing but without optimizing the sensing time and detection threshold. Yu et al.[10] maximized the average throughput of multi-channel CR under the constraints of detection probability for each channel by jointly optimizing the sensing time, SU assignment and energy detection threshold. Azarfar et al.[11] investigated the problem of joint transmission and CSS strategy optimization for a multi-user multi-channel dynamic spectrum access networks. However, Refs.[9-11] assumed that the reporting channels between the cognitive users and the fusion center(FC)are error-free, which is not realistic in practical CR systems since the reporting channels also suffer multi-path fading or interferences[12-14]. Both the sensing parameters and the reporting channel errors have an important influence on the performance of CSS, and the PUs have the priority over SUs in using the licensed spectrum. Therefore, in this paper, we take all of these factors into account and investigate the throughput maximization problem for multichannel CSS with reporting channel errors under hard decision fusion rules.
First, the global detection and false-alarm probabilities in terms of reporting channel errors at the FC are derived. Then, the throughput maximization problem for multi-channel CSS is formulated while giving all the PUs effective protection by jointly optimizing the sensing time, detection threshold and SU assignment. To tackle the non-convex optimization problem, the optimal energy detector threshold at each channel is derived first. Then, a sub-optimal greedy algorithm is proposed to obtain the optimal SU assignment and the optimal sensing time to maximize the spectrum access opportunities. The numerical results are presented to compare the performance between the proposed algorithm and the exhaustive search algorithm under perfect and imperfect reporting channels. The impacts of reporting error probability and channel utilization on the throughput are also analyzed.
1 System ModelIn this paper, a CRN with a FC,N primary channels, and M SUs is investigated. We consider the case where the SUs outnumber the channels, i.e., M>N. Hence, a couple of SUs can cooperate to sense the same channel. Each channel is licensed to one PU, and at a particular period of time, the channel may be inactive and is available for the SUs to transmit data. However, before utilizing the spectrum, the SUs have to sense the channel state(i.e., inactive ‘0'and active ‘1')by energy detection and only access the inactive channel. We assume that at least one SU is assigned to sense one PU channel and one SU is only allowed to sense one PU channel. The cooperation among M SUs is controlled by the FC.
Each frame for channel i includes sensing slot τs, reporting slot τr and transmission slot Tid. The PU is supposed to be either absent or present during the entire frame period T. We assume that the FC assigns mi SUs to sense the i-th channel. During the sensing slot, mi SUs individually perform spectrum sensing to detect the channel state that the FC assigns, and then send their sensing results to the FC in the reporting slot. Finally, the FC makes a global decision regarding the status of each channel.
The reliability of local spectrum sensing is usually evaluated by two performance metrics, namely, false-alarm probability and detection probability. The former represents the probability that the SU falsely identifies the free channel as being busy while the latter denotes the probability that the SU correctly identifies the busy channel as being busy. The probabilities of false alarm and detection over channel i can be given as[10]
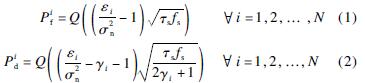
where Q(x)=1/((2π)1/2)∫∞xexp(-(t2)/2)dt; σ2n is the noise variance; εi is the energy detector threshold of the i-th channel; fs is the sampling frequency; γi is the received signal-to-noise ratio(SNR)of primary signal at the SUs on channel i. To facilitate the analysis, the received SNRs at the SUs for the same primary channel are assumed to be the same. With a given target  value, Pif
value, Pif , where Q-1(x)is the inverse function of Q(x), and for a given pair of
, where Q-1(x)is the inverse function of Q(x), and for a given pair of  , P-if), the required sensing time to achieve these targets on channel i can be given as τis=(Q-1(
, P-if), the required sensing time to achieve these targets on channel i can be given as τis=(Q-1( )-
)-
CSS is applied to improve the sensing performance by combining the sensing decisions from different spatially located SUs. Basically, CSS is performed in two successive phases: sensing and reporting. Several SUs independently sense the channel in the sensing phase and then forward their local decisions to the FC in the reporting phase. Finally, by fusing all local decisions, the FC makes a global decision on the existence of the PU.
In reality, the reporting channels in CSS are imperfect since they will suffer multi-path fading and shadowing, which will inevitably deteriorate the cooperation detection performance.As shown in Fig. 1, if a SU senses that the i-th channel is inactive and reports its sensing result to the FC through a fading channel, the FC will likely receive an error result that channel i is active(which is marked in bold). In this paper, we assume that the SUs which sense the same channel have identical local sensing performance and experience the same but independent reporting channel fading. Denote Pie as the reporting channel error probability between the SUs and FC over the i-th channel. Then, the effective false alarm probability and detection probability at the FC for the i-th channel are[6-7]
Pife=Pif(1-Pie)+(1-Pif)Pie=f(Pif)(3)
Pide=Pid(1-Pie)+(1-Pid)Pie=f(Pid)(4)
where f is a function which is defined as f(x)=(1-2x)Pie+x.
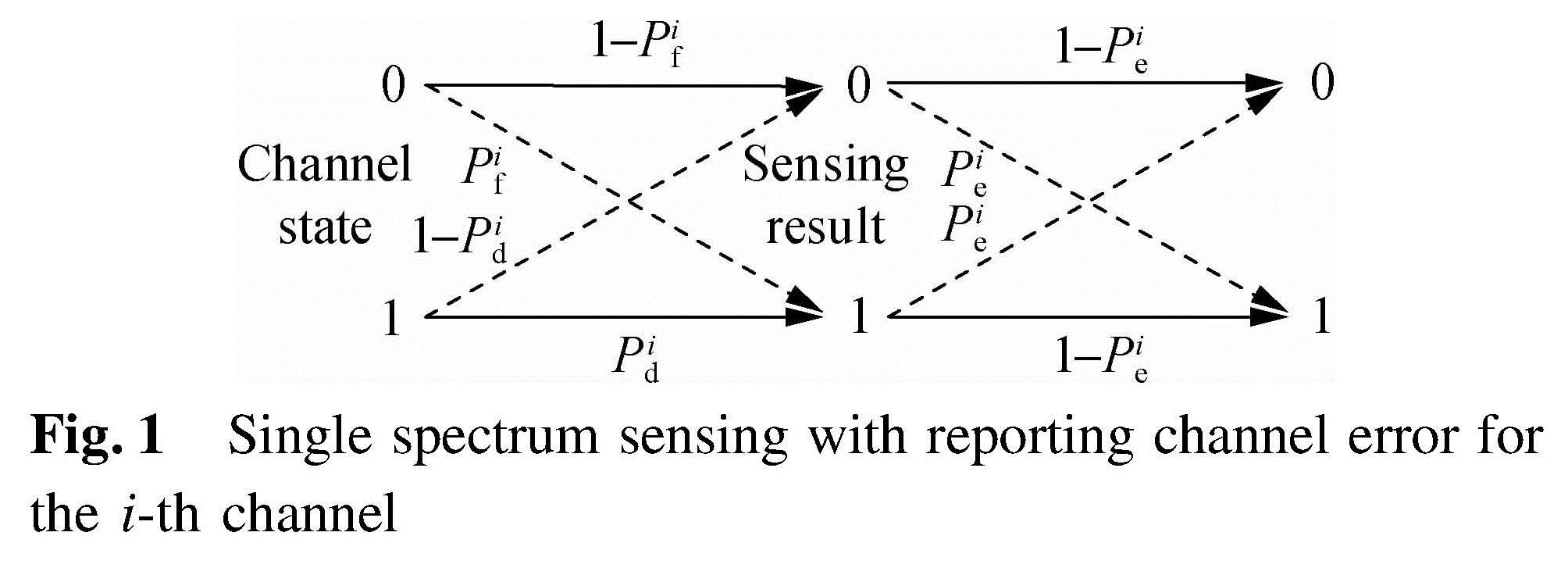
Fig.1 Single spectrum sensing with reporting channel error for the i-th channel
In this paper, we consider two hard decision fusion rules: “OR” rule and “AND” rule, which pertain to the extreme cases of the voting rule and have been widely used.
1)“OR” rule. In this rule, the FC announces that the i-th channel is active when at least one of the local decisions says that the PU is active on channel i. Considering the impacts of imperfect reporting channels, the global false probability Qife and detection probability Qide for channel i can be given as [13]
Qife=1-[1-f(Pif)]mi(5)
Qide=1-[1-f(Pid)]mi(6)
2)“AND” rule.In this rule, the FC announces that the i-th channel is active when all the local decisions say that the PU is active on channel i. Again, under the same conditions, the global false probability Qife and detection probability Qide for channel i can be expressed as
Qife=[f(Pif)]mi(7)
Qide=[f(Pid)]mi(8)
3 Problem Formulation and Solution3.1 Problem formulationThe usage of each channel is modeled as an alternative renewal process with active and inactive states. The durations of the active and inactive states on channel i are assumed to be exponentially distributed with mean values of αi1 and αi0, respectively[9]. Thus, the probability density functions of active and inactive periods on channel i can be, respectively, given as
pi1(t)=1/(αi1)exp(-(t)/(αi1))(9)
pi0(t)=1/(αi0)exp(-(t)/(αi0))(10)
Accordingly, let μi denote the utilization of channel i, i.e., the active state probability of PUs on channel i. It can be computed as
μi=(αi1)/(αi0+αi1)i=1,2,…,N(11)
Considering the effects of false alarm and missed detection,there are two cases that the SUs can operate on channel i: 1)When the channel is inactive, and the FC correctly determines it with probability(1-μi)(1-Qife); 2)When the channel is active, while the FC falsely determines it as inactive with probability μi(1-Qide). Let Ci0 and Ci1 denote the achievable transmission rate of SUs if they are allowed to operate on the i-th channel in the absence and the presence of the PU, respectively, and define γi0 and γi1 as the corresponding SNR of the secondary transmission link on the i-th channel when the PU is absent and present.Then, we have Ci0=log2(1+γi0), Ci1=log2(1+γi1). Thus, for channel i, the average throughput of the SUs under these two cases can be given as
Ri0(τs,εi,mi)=(TidCi0)/T(1-μi)(1-Qife(τs,εi,mi))(12)
Ri1(τs,εi,mi)=(TidCi1)/(T)μi(1-Qide(τs,εi,mi))(13)
where Tid=T-τs-miτr. Therefore, the average throughput of the SUs on the i-th channel is given as
Ri(τs,εi,mi)=Ri0(τs,εi,mi)+Ri1(τs,εi,mi)
In this paper, our aim is to maximize the average throughput of SUs while protecting all the PUs from harmful interference by jointly optimizing the sensing duration, energy detection threshold and SU assignment. Therefore, the optimization problem for multi-channel CSS with reporting channel errors can be formulated as
P1:  (14)
(14)
s.t.
Qide≥φi(14a)
Qife≤φi(14b)
0≤τs≤T-miτr(14c)
1≤mi≤M(14d)
 (14e)
(14e)
where φi is the minimum target detection probability on channel i which protects the PU; φi is the maximum false alarm probability on channel i to ensure the opportunistic spectrum access of SUs.
The operation of the SUs in case 2)experiences interference from the PU.Therefore, we have Ci0>Ci1. Generally,Qife<Qide. Moreover, in CRNs, we care more about the channels that are not fully utilized, such as the channels with μi≤0.5. Based on these considerations, we conclude that Ri1(τs,εi,mi)Ri0(τs,εi,mi). Hence, for convenience, the following formula will be used as the objective function rather than(14).
 (15)
(15)
In Problem P1, we can find that both Qide and Qife are determined by the sensing time τs, the energy detector threshold εi, the number of cooperative SUs mi and the reporting channel error probability Pie. Due to the complicated coupling among the optimization variables, Problem P1 is non-convex.In this section, to make the problem tractable, the optimal energy detector threshold on channel i is derived first. Then, a sub-optimal greedy algorithm is developed to obtain the optimal SU assignment and the optimal sensing time.
Problem P1 achieves the optimal solution when the constraint(14a)is equal.The proof is similar to Ref.[10].Here, we only explain it briefly. To maximize the achievable average throughput of SUs, according to Eq.(15), the global false alarm probability Qife(τs,εi,mi)needs to be minimized, that is, the sensing threshold εi needs to be maximized as the value of Qife(τs,εi,mi)is inversely proportional to εi. When εi is maximized, Qide(τs,εi,mi)is minimized. Namely, Qide=φi. Therefore, for any given pair of τs and mi, according to Eq.(2), the sensing threshold εi which satisfies(14a)can be derived as
εi=σ2n[((2γi+1)/(τsfs))1/2Q-1(βi)+γi+1](16)
We assume that the target detection probabilities on all channels are equal. Generally, φi is chosen to be close to but less than 1, especially in the low SNR regime.For channel i, with Qide=φi,Qife≤φi, we have τs≥τi, where τi=((Q-1(δi)-(2γi+1)1/2Q-1(βi))/(γi(fs)1/2))2. For the “AND” rule, δi=((φi)mi-Pie)/(1-2Pie), βi=((φi)mi-Pie)/(1-2Pie). For the “OR” rule, δi=((1-φi)mi+Pie-1)/(2Pie-1), βi=((1-φi)mi+Pie-1)/(2Pie-1).
Based on the above discussions, Problem P1 can be simplified to Problem P2 as
P2: (17)
(17)
s.t.
0≤τs≤T-miτr(17a)
1≤mi≤M(17b)
 (17c)
(17c)
To solve problem P2, we transform problem P2 to P3.
P3:max{mi}R({mi})=R*2({mi})(18)
s.t.
1≤mi≤M(18a)
 (18b)
(18b)
where R*2({mi})is the optimal objective value of Problem P4 with a given {mi} value.
P4: (19)
(19)
s.t.
0≤τs≤T-miτr(19a)
Following a similar process as adopted in Ref.[5], we can also prove that R2(τs)of Problem P4 is a unimodal function. Hence, the optimal sensing time in problem P4 can be obtained by efficient search algorithms such as the binary searching method. Algorithm 1 presents the proposed greedy algorithm to achieve the optimal sensing time and the optimal SU assignment.
Algorithm 1 Greedy algorithm
Input: T, fs, τr, M, N, φi.
Output:The optimal SUs assignment {mi}.
Initialization: Pie, μi, γi, γi0,mj={mi}j={1,1,…,1}, j←0.
while
for all i=1 to N do
Let mj+1←mj.
Let mj+1(i)←mj(i)+1.
For the given mj+1, find the maximum average throughput  by solving P4.
by solving P4.
endfor
Find i* that maximize the  then let mj+1←mj,mj+1(i*)←mj(i*)+1.
then let mj+1←mj,mj+1(i*)←mj(i*)+1.
j←j+1.
end while
The optimal SUs assignment {mi} is obtained, and the corresponding optimal sensing time can be obtained by solving P4.
3.3 Complexity analysisThe computational times of solving Problem P4 by the proposed greedy algorithm are compared with the exhaustive algorithm as shown in Tab.1 with N=5 given[10]. We can see that when M>N, the proposed greedy algorithm only requires(M-N)N optimization operations. Given N, the complexity of the greedy algorithm only linearly increases with the increase in the number of SUs, while as M-N increases, the complexity of the exhaustive search algorithm rapidly increases. Thus, the proposed algorithm is much easier and faster than the exhaustive algorithm, especially when M and N are large.
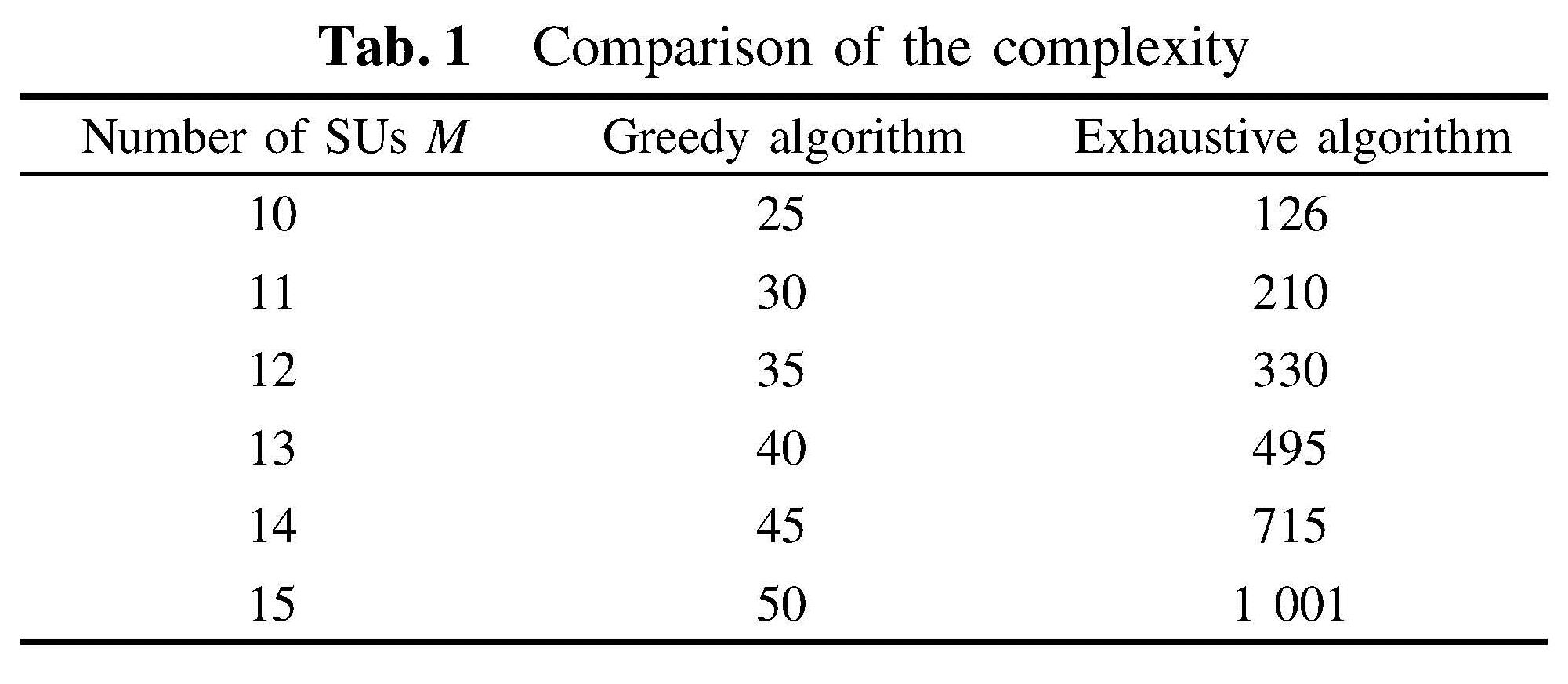
Tab.1 Comparison of the complexity
4 Simulation Results
In this section, simulation results are presented to verify the effectiveness of the proposed algorithm. For comparison, we also provide the exhaustive algorithm[10], in which all the possible combinations of {mi} are searched. Unless otherwise specified, the number of channels N=5, the frame time slot T=100 ms, the sampling frequency fs=6 MHz, and the reporting time of each SU τr=10 μs. Moreover, the target detection probabilities φi on all channels are set to be 0.9, the channel utilizations μi on all channels vary from 0.2 to 0.5 randomly, and the received SNRs γi on all channels are randomly generated in the range of -20 to -15 dB.The reporting error probability Pie on each channel ranges from 0.003 to 0.008 randomly. The channels are assumed to be block faded and the SNRs γi0 of the secondary transmission links are ergodic, stationary and exponentially distributed with the mean 20 dB. In this paper, the numerical results are obtained by averaging over 1 000 independent simulation runs.
In Fig.2, the maximum average throughput versus the number of cooperative SUs under perfect and imperfect reporting channels are plotted for the proposed greedy algorithm and the existing exhaustive algorithm. It is evident that the maximum average throughputs of these two algorithms match well with each other. We can see that the average throughput of the “AND” rule is superior to that of the “OR” rule. This is because the global false-alarm probability of the “AND” rule is lower compared with “OR” rule, and therefore, more transmission opportunities can be offered to SUs to transmit data, thus improving the average throughput of the system.It is also observed that the imperfect reporting channels indeed worsen the global detection performance and cause the throughput to decrease.
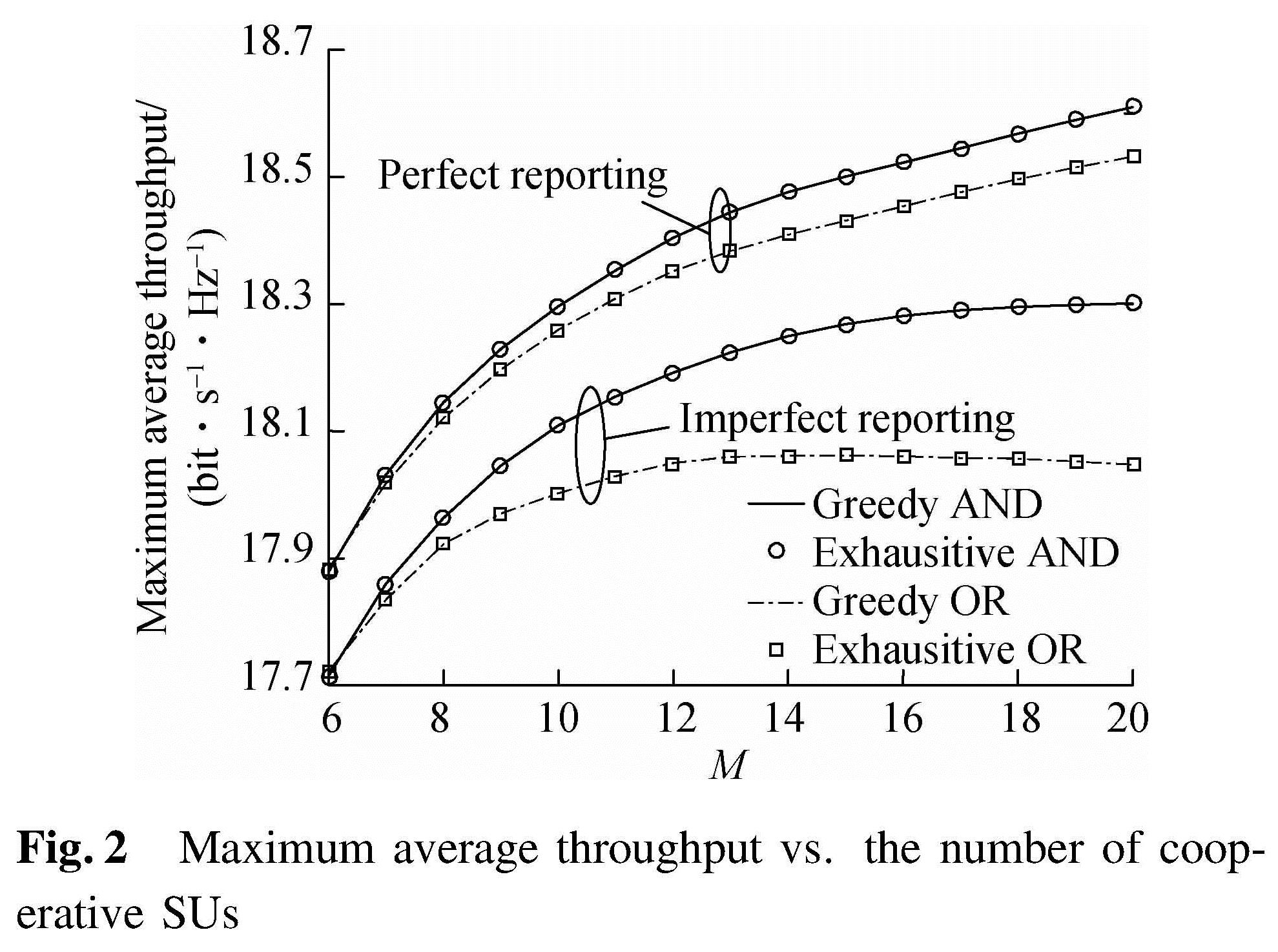
Fig.2 Maximum average throughput vs. the number of cooperative SUs
Fig.3 illustrates the optimal sensing time versus the number of cooperative SUs under perfect and imperfect reporting channels for the “AND” rule. It is observed that as the number of cooperative SUs increases, the optimal sensing time decreases. Besides, with a given number of SUs, the optimal sensing time is longer under imperfect reporting.Hence, less time will be left for data transmission, resulting in the throughput degradation of the system.
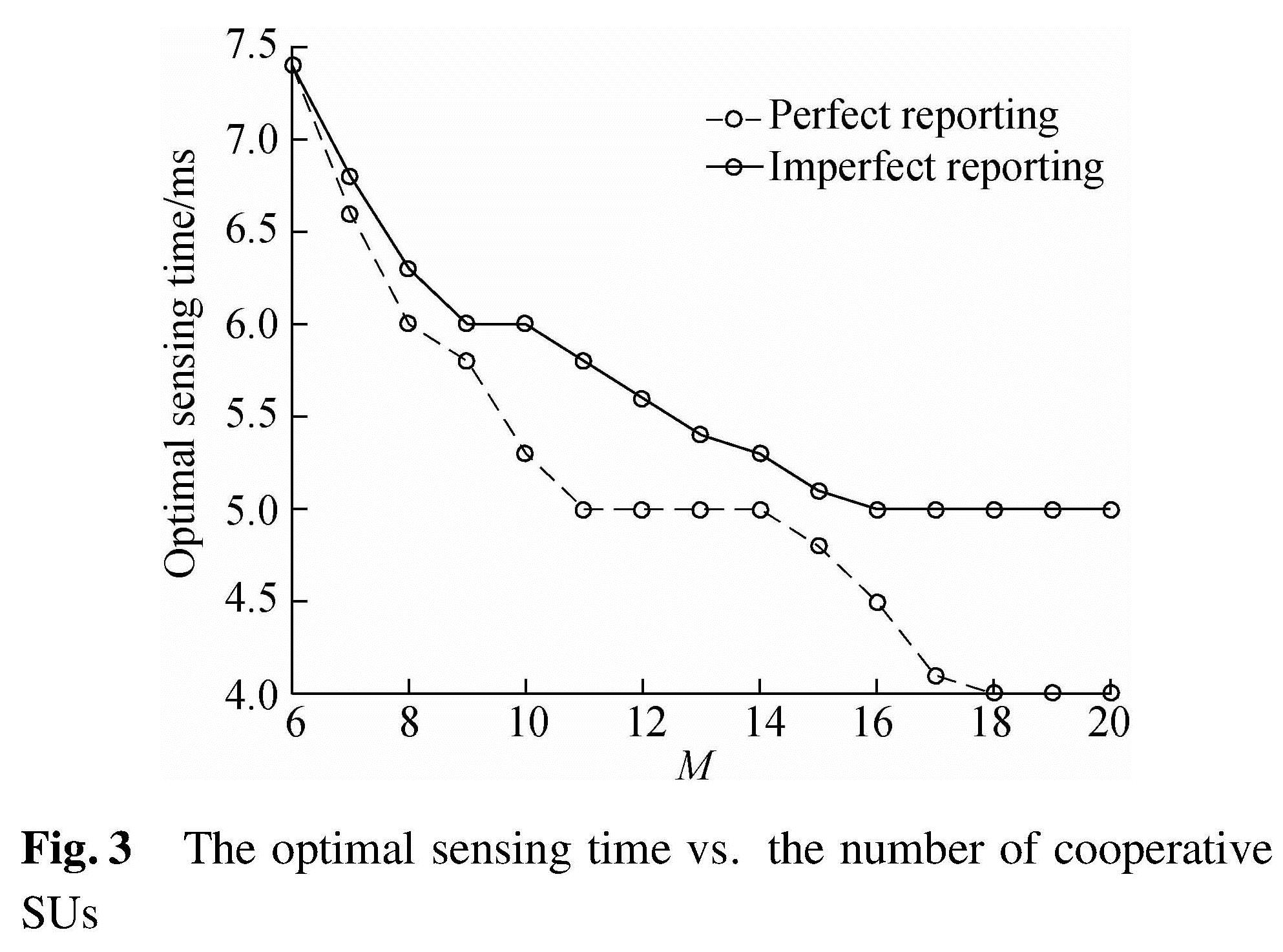
Fig.3 The optimal sensing time vs. the number of cooperative SUs
Fig.4 shows the maximum average throughput versus the reporting channel error probability with different γi for the proposed greedy algorithm and the exhaustive algorithm. In this figure, the reporting error probabilities on different channels are assumed to be the same. Similar to Fig.2, the proposed greedy algorithm coincides with the exhaustive solution. It can be seen that the throughput displays a more obvious decreasing trend with lower SNR. Hence, the reporting channel errors should not be ignored especially when the SNR environment is poor. Besides, compared to the “OR” rule, the throughput of the “AND” rule decreases slightly and is affected little by the reporting errors under higher SNR. This is because in the “AND” rule, the FC declares that a channel is active when all the local decisions say that it is active, and thus the robustness against reporting channel errors can be improved.
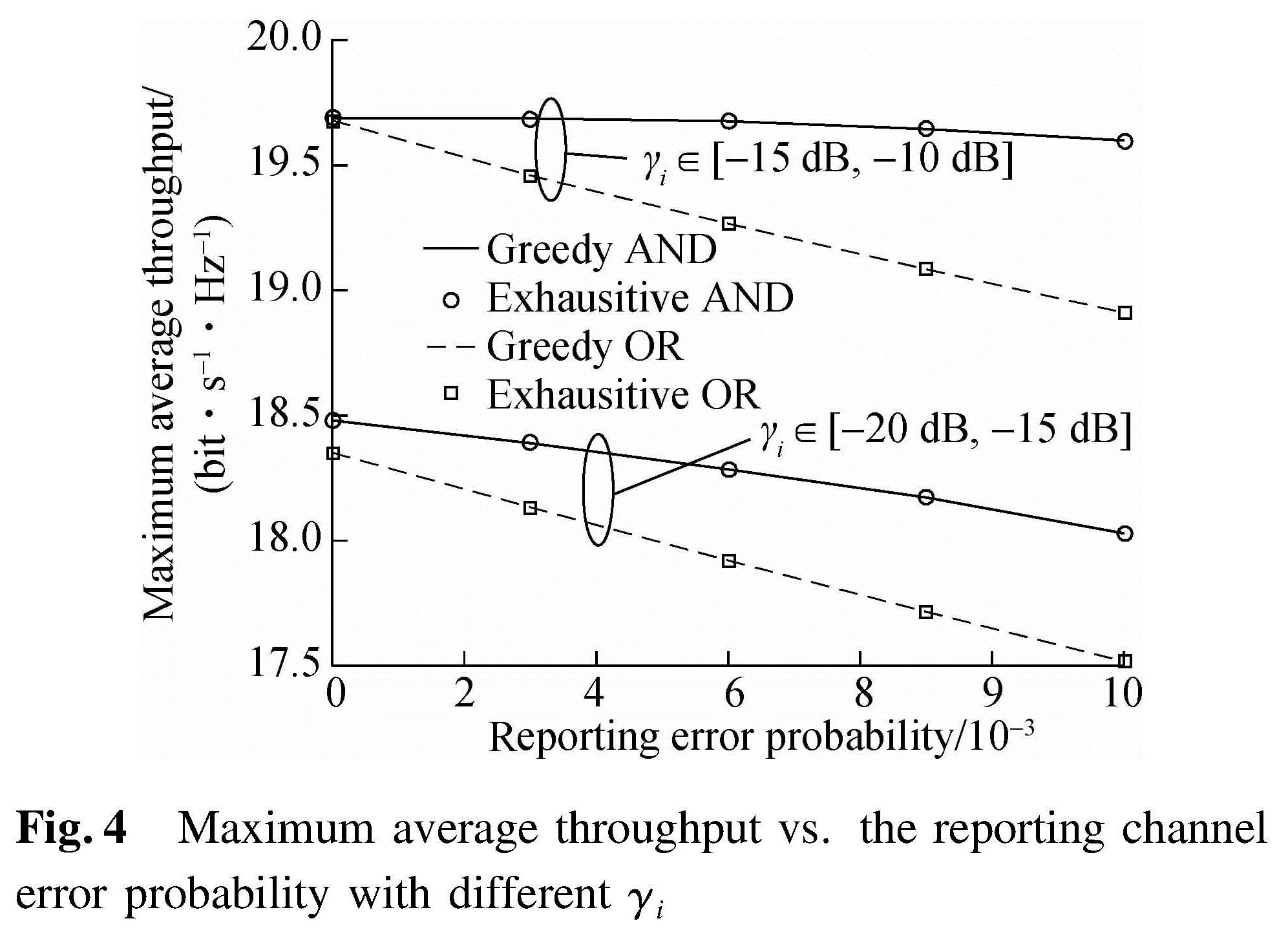
Fig.4 Maximum average throughput vs. the reporting channel error probability with different γi
Fig.5 shows the maximum average throughput versus sensing time with different channel utilizations μi. It is seen that the larger the channel utilization, the lower the maximum average throughput. This is because larger channel utilization implies that the channel is busy most of the time and the SUs will have little chance to access the channel, and thus the throughput declines. Moreover, we can discover that at first, the “OR” rule has a greater throughput than the “AND” rule. However, when the sensing time further increases, the throughput of the “AND” rule is larger instead. The reason is that when the sensing time is short, the “OR” rule has a lower global false alarm probability; when the sensing time is long enough, the “AND” rule has a lower false alarm probability instead, which indicates that more unused spectrum can be exploited by the SUs, thus improving their average throughput.
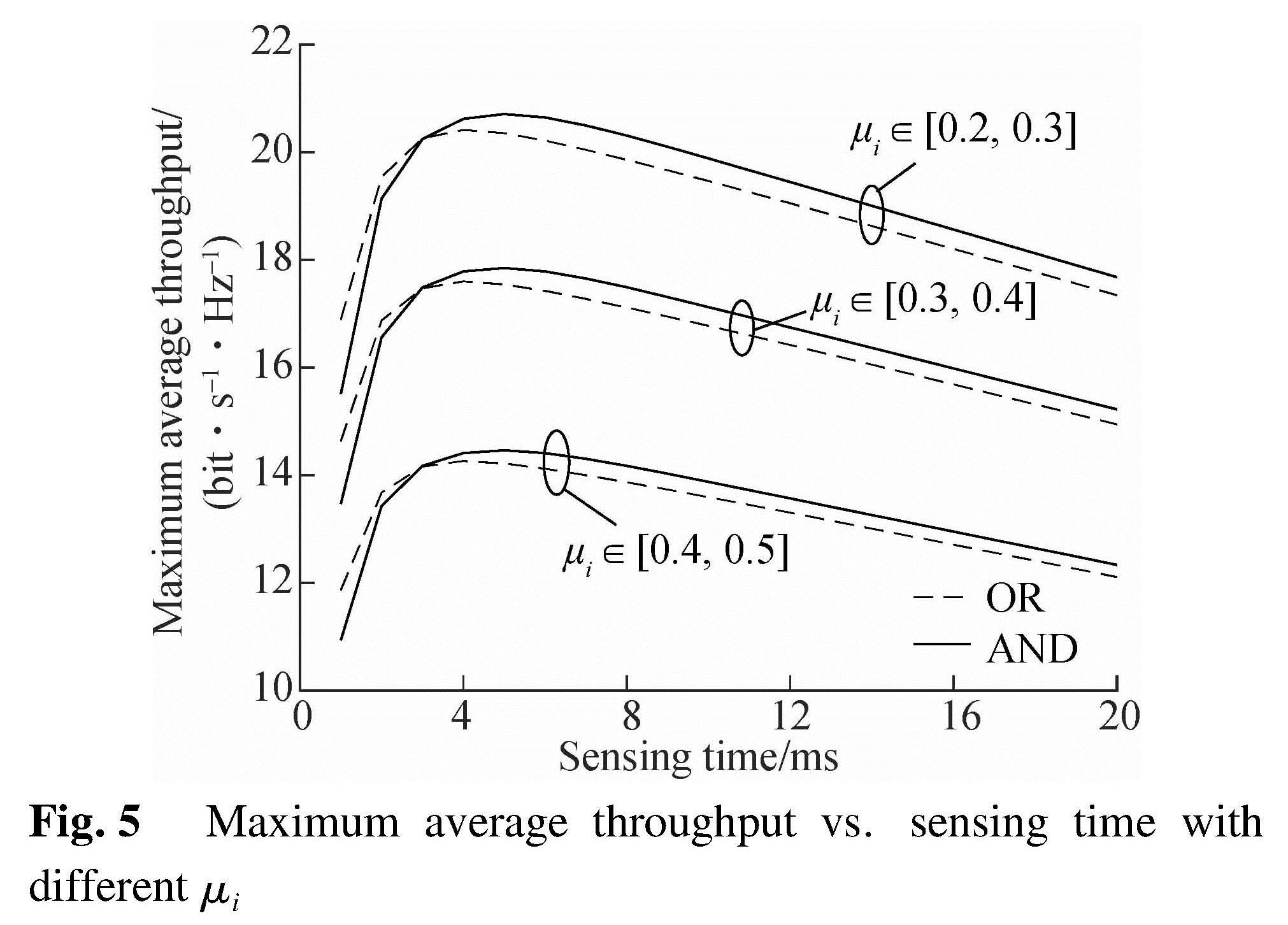
Fig.5 Maximum average throughput vs. sensing time with different μi
5 Conclusions
1)In this paper, we investigated the throughput maximization problem for multiple channel CSS over imperfect reporting channels. Considering the impact of reporting channel errors, the effective false alarm probability and detection probability at the FC are derived.
2)The detection threshold, sensing duration and SUs assignment are jointly optimized to maximize the average throughput of SUs while maintaining the quality of service of all PU channels.A sub-optimal greedy algorithm is developed to obtain the optimal sensing time and the SUs assignment.
3)Numerical results show that the proposed greedy algorithm achieves the same performance as that of the exhaustive search algorithm but with a much lower complexity, and the average throughput under the imperfect reporting channels is always lower than that under the perfect case.
- [1] Sharma S K, Bogale T E, Chatzinotas S, et al. Cognitive radio techniques under practical imperfections: A survey [J]. IEEE Communications Surveys& Tutorials, 2015, 17(4): 1858-1884.DOI: 10.1109/COMST.2015.2452414.
- [2] Ali A, Hamouda W. Advances on spectrum sensing for cognitive radio networks: Theory and applications [J]. IEEE Communications Surveys & Tutorials, 2017, 19(2): 1277-1304. DOI: 10.1109/COMST.2016.2631080.
- [3] Sobron I, Diniz P S R, Martins W A, et al. Energy detection technique for adaptive spectrum sensing [J]. IEEE Transactions on Communications, 2015, 63(3): 617-627. DOI: 10.1109/TCOMM.2015.2394436.
- [4] Akyildiz I F, Lo B F, Balakrishnan R. Cooperative spectrum sensing in cognitive radio networks: A survey [J]. Physical Communication, 2011, 4(1):40-62. DOI: 10.1016/j.phycom.2010.12.003.
- [5] Peh E C Y, Liang Y C, Guan Y L, et al. Optimization of cooperative sensing in cognitive radio networks:A sensing-throughput tradeoff view [J]. IEEE Transactions on Vehicular Technology, 2009, 58(9): 5294-5299. DOI: 10.1109/TVT.2009.2028030.
- [6] Banavathu N R, KhanM Z A. Optimization of N-out-of-K rule for heterogeneous cognitive radio networks[J]. IEEE Signal Processing Letters, 2019, 26(3): 445-449. DOI: 10.1109/LSP.2019.2893999.
- [7] Banavathu N R, Khan M Z A. On throughput maximization of cooperative spectrum sensing using the m-out-of-K rule [C]// IEEE 89th Vehicular Technology Conference. Kuala Lumpur, Malaysia, 2019: 1-5. DOI: 10.1109/VTCSpring.2019.8746391.
- [8] Yang T T, Wu Y C, Li L, et al. Fusion rule based on dynamic grouping for cooperative spectrum sensing in cognitive radio [J]. IEEE Access, 2019, 7: 51630-51639. DOI: 10.1109/ACCESS.2019.2910809.
- [9] Huang D Y, Kang G X, Wang B, et al. Optimized cognitive terminal assignment strategy for coordinated spectrum sensing [C]// 2013 IEEE 24th Annual International Symposium on Personal, Indoor, and Mobile Radio Communications. London, UK, 2013: 2291-2295. DOI: 10.1109/PIMRC.2013.6666526.
- [10] Yu H G, Tang W B, Li S Q. Optimization of cooperative spectrum sensing in multiple-channel cognitive radio networks [C]// 2011 IEEE Global Telecommunications Conference.Houston, TX, USA, 2011: 1-5. DOI: 10.1109/GLOCOM.2011.6133532.
- [11] Azarfar A, Liu C H, Frigon J F, et al. Joint transmission and cooperative spectrum sensing scheduling optimization in multi-channel dynamic spectrum access networks [C]// 2017 IEEE International Symposium on Dynamic Spectrum Access Networks. Piscataway, NJ, USA, 2017: 1-10. DOI: 10.1109/DySPAN.2017.7920789.
- [12] Hwang I,Lee J W. Cooperative spectrum sensing with quantization combining over imperfect feedback channels [J]. IEEE Transactions on Signal Processing, 2017, 65(3): 721-732. DOI: 10.1109/TSP.2016.2626251.
- [13] Alam S, Annamalai A, Akujuobi C M. Optimizations of cooperative spectrum sensing with reporting errors over myriad fading channels [C]// 2017 IEEE 7th Annual Computing and Communication Workshop and Conference. Las Vegas, NV, USA, 2017: 1-5. DOI: 10.1109/CCWC.2017.7868356.